






This is a Collaborative Robotic Arm Used as Assistant in an Electronic Workshop And Controlled by Voice Commands and Capsense Technology. Using a robotic arm as a third arm can be a very good idea in difficult cases in an electronic workshop. Here I am showing three versions of my project, and the main functions are: a) controlling and depopulating PCBs for harvesting chips, resistors, capacitors, coils, etc; b) pick and place objects such as box or bottle; and c) object sorter. In the first version I'm using Artificial Intelligence (AI), with hardware as Alexa Echo Dot, ESP32-WROOM-32, and Arduino Nano 33 BLE Sense; and free open source tools such as FauxmoESP library and Arduino IDE. In the second version, I am using capsense buttons and two gripper jaws to improve the performance of the robotic arm tasks with the Infineon PSoC 62S2 Wi-Fi BT Pioneer Kit and ModusToolbox Software. Finally, in the third version with a 3D magnetic sensor I have created a mechanism to detect objects that pass through a belt and combining it with any version of a robotic arm we have an object sorter.
Arduino Version: This project was a good experience as I used a free tool to control my robot arm with the Alexa Echo Dot device. Also I can increase the voice commands as far as the memory capacity of the processor allows. As you can see, the clamp has large dimensions, so it can hold much larger objects, or even hold them in the right place so that we can work comfortably.
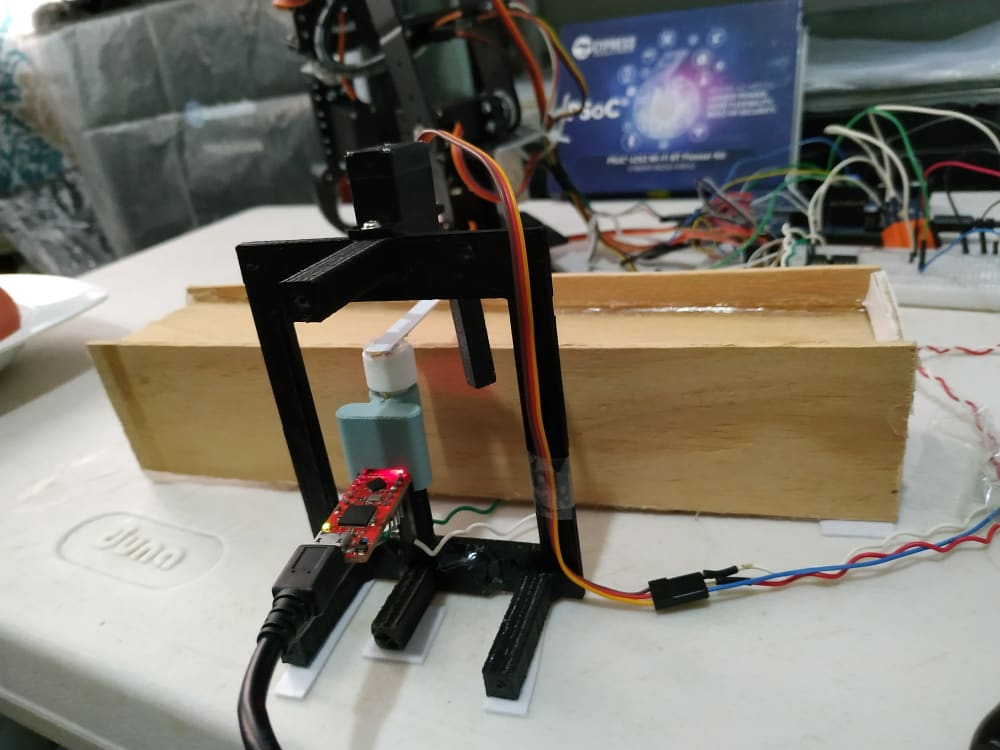
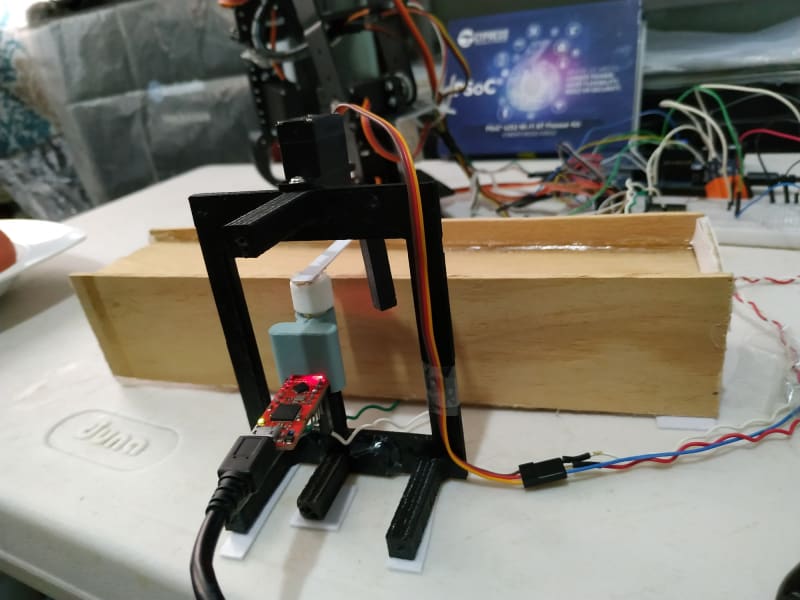
Infineon Version: In this version of the robotic arm I tried something different. I used capsense technology buttons and sliders to hold PCB boards in my electronics workshop. I had the idea of holding PCB boards to solder and unsolder electronic components.
Sorting Objects: In this project the idea is to combine the robotic arm with a 3D magnetic sensor to classify objects. Here I took time to invent the piece that holds the magnetic sensor. The operating mechanism is easy since the moving object rotates the magnetic sensor knob and this activates the robotic arm.
PUBLICATION:
Link to the publication on Hackaday:
https://hackaday.io/project/192151-work-holding-robotic-arm-for-electronic-workshop
Like this entry?
-
About the Entrant
- Name:Guillermo Perez
- Type of entry:individual
- Patent status:none