





Global warming and natural disasters such as floods, droughts, tornadoes, and hurricanes etc. play havoc with food production and thermal stress in plants seriously affects crop yields.
GroDomes....a logical extension of Monolithic Dome Technology....provides an answer to all of the hazards depicted above and together with LED grow wavelength technology provides an opportunity to engineer and farm a reliable yield of crops regardless of environmental extremes.
Research has shown that the Sun's natural radiation has certain incoming wavelengths which actually deter plant growth and maturity and others (related to LED wavelengths) actually encourage these attributes.
Plants don't like thermal stress either snap cold or remorseless heat. With monolithic domes external dome temperature variances of + or - 25 degrees only change the dome's internal temperature by 2 degrees so the maintenance of air and soil temperature within the dome is economically controlled using very little energy.
This opens up all sorts of plant growing possibilities in harsh environments providing vegetables for indigent populations, which in turn helps health issues common to a lack of vegetable consumption.
With global climate change and its effect on plant growth, the monolithic dome GroDomes provide the edge in crop production and offset the effects of floods and droughts and extreme temperature swings.
An advantage in the GroDome concept is that all aspects of the growing cycle are within the farmer's control...no more flooded fields, no more cantankerous weather conditions, no more late June hailstorm damage etc.etc. All farm work will be under cover regardless of the weather conditions outside. It may even be possible to control bug infestations by wavelength variations from LEDs. Obviously product can be grown all the year round under these conditions.
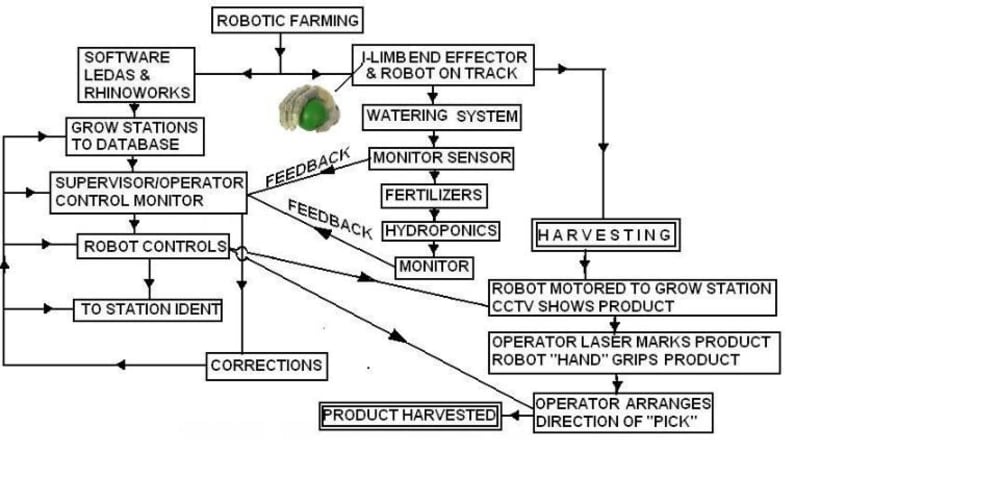
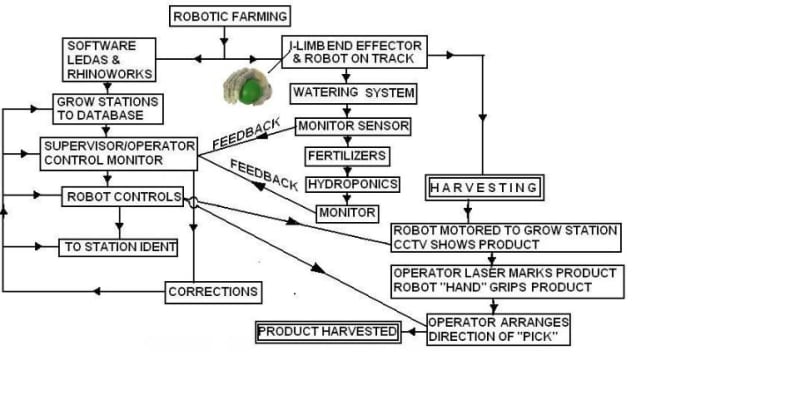
Visualized is a remotely driven robot using dual use irrigation monorails around the dome to travel along scanning the product. A laser designator is used to identify ripened product by using dedicated colour sensors and since the robot knows where it is stationwise, and manipulation by an operator to identify the product establishes the other two co-ordinates in 3D space the whole product population ready for harvesting ends up in a 3D database and may be automated for harvesting.
The operator's control console could be DS Nintendo or PSP styles to accomplish the objective. Since we have a generation of gamers coming into the workforce these are the youngsters we would employ to harvest the farm produce, providing them with jobs, using their gaming skills to get around harvesting problems and keeping them gainfully employed. The end effector of the robot would have a colour sensor which would automatically reject any 3D co-ordinate referenced by the laser designator if pre arranged colour data was not present(this colour sensor can automate the scanning process since only matching colours would enter the 3D database).
Seeding and irrigation is readily automated and where tiered hydroponic growing is featured irrigation/tracks for conveying robotic arms can in many cases carry out automated routines. The gamer operators take over where a human/machine interface is required.
Like this entry?
-
About the Entrant
- Name:John Mitchell
- Type of entry:teamTeam members:Peter Meyer, Collin MacLeod,
Gerald Lawrence, George Scott, John Mitchell - Software used for this entry:RhinoCad, Solidworks, Lidas
- Patent status:none