
DENSITY AND PRIORITY BASED TRAFFIC CONTROL SYSTEM USING COMPUTER VISION IN ARM PROCESSOR
Most of the traffic control system in developing countries are works based on fixed time concept, the time for Green/Red signals are previously set on the basis of expected traffic densities. Such systems are not dynamic and yields poor results in many situations. Comparatively newer trend is the use of close circuit Charge Coupled Device (CCD) cameras in traffic junctions and in high density areas for surveillance(eg.India). But compared to the huge amount of money spend by the govt. for just the surveillance system is inefficient.
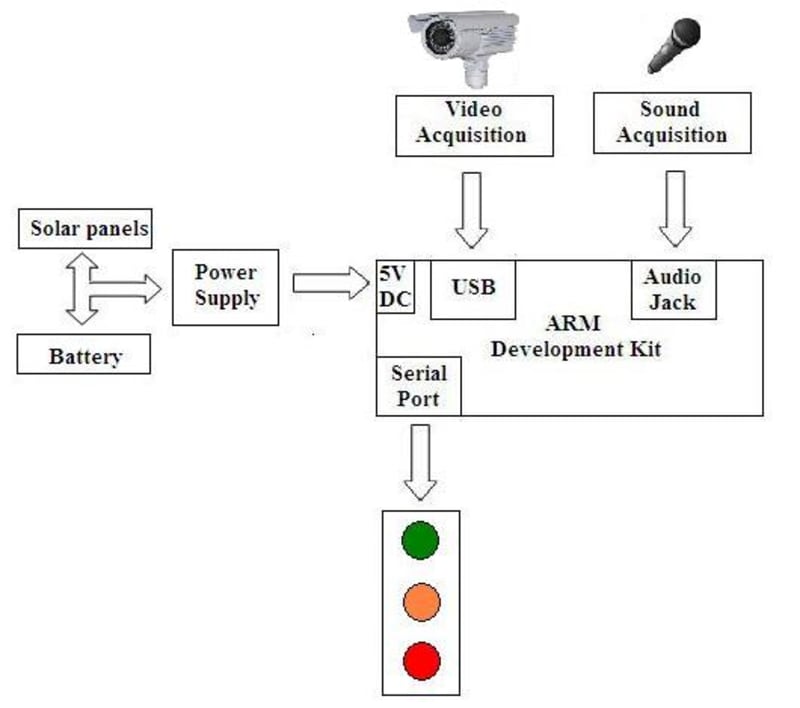
The goal of our project is to improve the existing traffic control and surveillance systems by multi-tasking the cameras of surveillance systems to control traffic flow. This improved traffic control system will take into account wider range of subtleties in traffic patterns using image processing techniques, and will be a standalone system powered by an ARM processor. It is directly deployable at any traffic junction as a standalone unit at very cost effective and feature rich compared to present technologies like Internet Protocol (IP).
This system track traffic density at junctions using cameras and control the traffic signals Red, Green& Amber. The time given for PASS/STOP at a junction is dynamically determined using a Self Adjusting Algorithm from the live video feeds taken using a camera. The novelty of our work is that the control is not just based on density but priority. Priority will be given to specific class of vehicles like ambulances, police vehicles etc. tracked using Machine Learning algorithms for feature detection from live video feeds with very high accuracy. The system is intelligent enough to detect multiple ambulances ,can account for any level of zoom (distance of ambulance from junction), change in its orientation, or change in light intensities. The accuracy of the system is further increased by running a Sound analysis engine to detect Ambulance Sirens along with image based detection.
The whole system will require intensive processing power at every junction, but deploying a computer for this purpose is neither feasible nor economical either. So an alternative is to use stand alone processors for this purpose. The product is a directly deployable standalone system running on Advanced Reduced Instruction Computing Machines (ARM) series processors. It can drive itself using solar panels and a battery pack.
Overall the system will provide much more improved features than conventional systems with high level of accuracy, reliability and will be direct deployable with much lesser power consumption.
Like this entry?
-
About the Entrant
- Name:Arun Raveendran
- Type of entry:individual
- Software used for this entry:C, Angstom Linux, OpenCV Libraries, Octave
- Patent status:none