




A classic engine relies on a crankshaft and a rod to transmit the motion from the piston to main axis, with two main problems with energy loss: the piston motion approximating a sine, which is not optimal for energy transmission to the crankshaft, and the swinging motion of the rod.
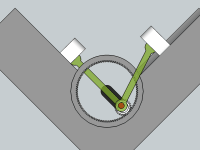
My entry is an engine design that complements the crankshaft with a secondary shaft, to allow more complex piston motions for better tuning and fuel efficiency. The secondary crankshaft is driven by an internal gear, so the motion depends on the satellite (gear mounted on the shaft) size compared to the internal one, and the offset between the secondary crankshaft axis and the rod axis:
- Case 1: 50% size satellite, offset equal to gear radius
With these parameters, the piston motion becomes a perfect sine, and the rod swinging does not occur. pistons can be offset by 90° increments.
An interesting alternative is if the crankshaft is rotated 180° from the configuration shown in the second entry picture: with this configuration, the piston motion relies only on the rod swinging, achieving two cycles for each main axis cycle.
- Case 2: 25% size satellite, offset 4/9 of gear radius
If the configuration is similar to the one shown in the second entry picture (case 2), the offset is optimal to minimize (actually zero) the piston acceleration during high and low point. pistons can be offset by 90° increments.
The piston motion is closer to a square motion, and the piston sped (and so power delivered ) is highest during 90° and 270° points, when the torque on the main axis is most efficient.
- Case 3: 1/3 size satellite, offset 3/4 of gear radius
Similarly, the offset is optimal to minimize the piston acceleration during high point. pistons can be offset by 60° increments.
Compared to the classic motion, this configuration slows down the piston after ignition, and is faster after expansion.
Compared to other engine concepts with non-sine piston motions, this concept is closer to a classic engine, with relatively close size and similar pistons. it allows fine tuning and flexible configuration with the rod axis offset.
Like this entry?
-
About the Entrant
- Name:Francois Gibon
- Type of entry:individual
- Software used for this entry:sketchup, openoffice
- Patent status:none