





Magnetic conveyor system for moving objects in space.
1. Application
Our proposed magnetic conveyor system (MCS) is intended for moving/ transporting various items (goods, cargo) and for use as a kinematic pusher mechanism for flying objects in both Earth’s gravity and space’s zero-gravity conditions.
Currently available designs of conveyors with electric motors are widely used within various industries, construction and other ground applications. They are powerful but very heavy, stationary and non-flexible.
In light of active space exploration, humanity has started to think about developing long-term space stations. Thus, various mechanisms and devices to facilitate working conditions of astronauts during construction and installation of various space objects are of great interest. New engineering solutions are required now in order to use operating conveyors in space. We believe that the proposed MCS will be useful for orbital stations and on the moon.
We have developed a conceptual solution of MCS, which can serve as a basis for magnetic tape conveyors for the movement of objects in weightlessness.
The MCS distinctive features are the following:
1. A conveyor’s tape is made of magnetic flexible plastic tape.
2. Pulleys are made of permanent magnets or electromagnets, with magnetic field strength providing a secure grip between the pulleys and the moving magnetic tape.
3. The whole device is lightweight with a wide range of degrees of free spatial orientation and speed of the transport magnetic tape.
4. It can be operated using manual and remote controls.
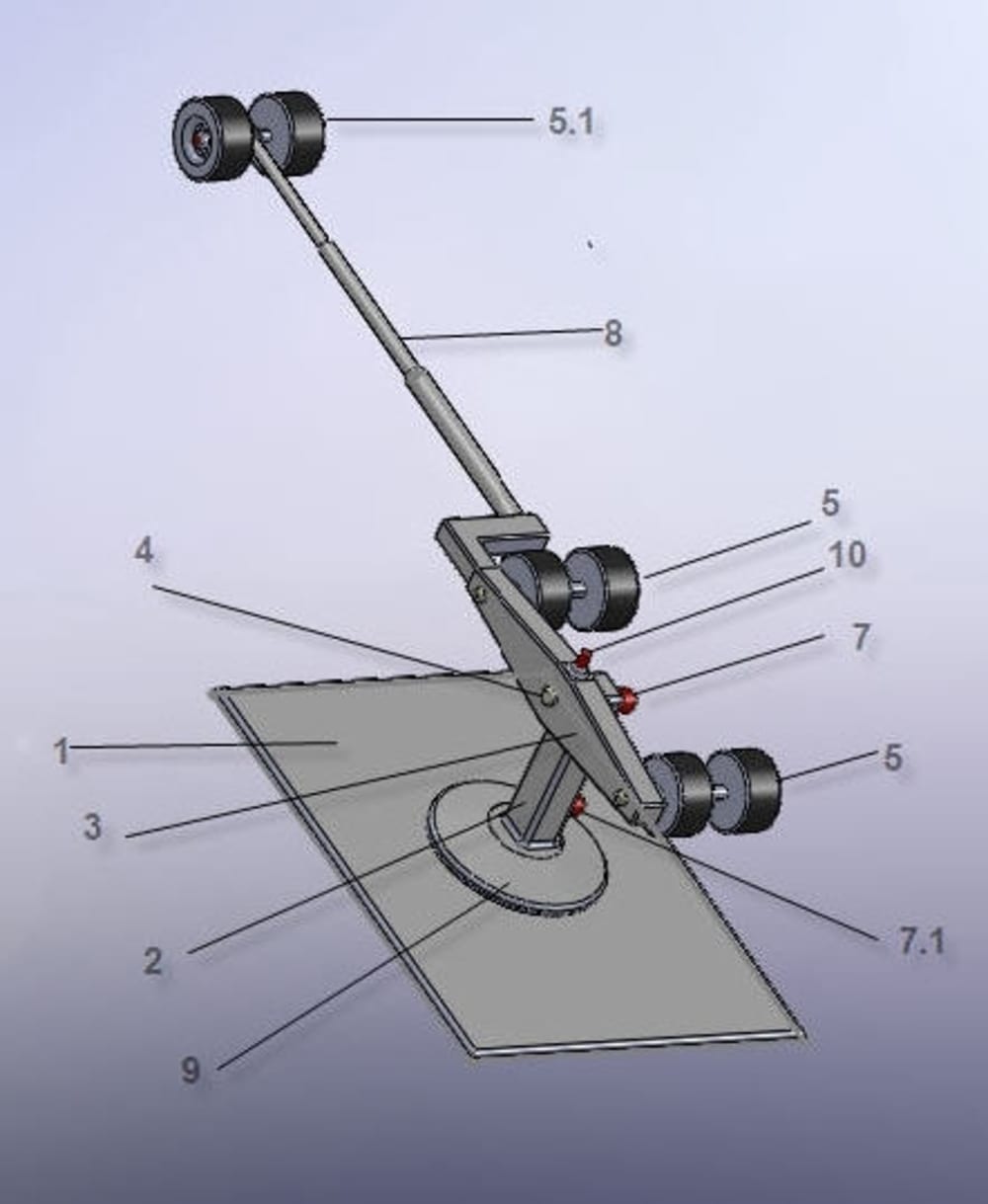
2. The MCS structure ( Fig. 1 )
1. Platform or other surface to which a conveyer’s mounting block is attached.
2. Swivel stand - a joint that allows a mechanical part of a conveyer’s mounting block attached to it to turn freely from side to side in a full circle.
3. Swivel traverse - a pivoting support that allows a conveyor’s part to turn 900 up from its original horizontal position.
4. Shaft of a swivel traverse 3, which provides a free up and down movement.
5. Pulleys: 5.1 - a leading pulley - a mounted rotating wheel or a cylindrically shaped device that transmits force and motion to a belt via its rotation. 5.2 - a take-up pulley that maintains belt tension. 5.3 - a bend pulley over which a belt moves to change direction of a pulling force to opposite. The pulleys or their rims are magnetic.
6. Belt - a continuing moving tape made of a flexible strong ferromagnetic plastic material.
7. Electric motors: a main drive and auxiliary ones.
8. Telescopic pole - an expandable device combined with a pulley 5.2 to adjust a belt tension.
9. Base of a swivel stand 2 fixed to a platform 1.
10. Sensory transmitter for remote controlling a conveyer’s operation
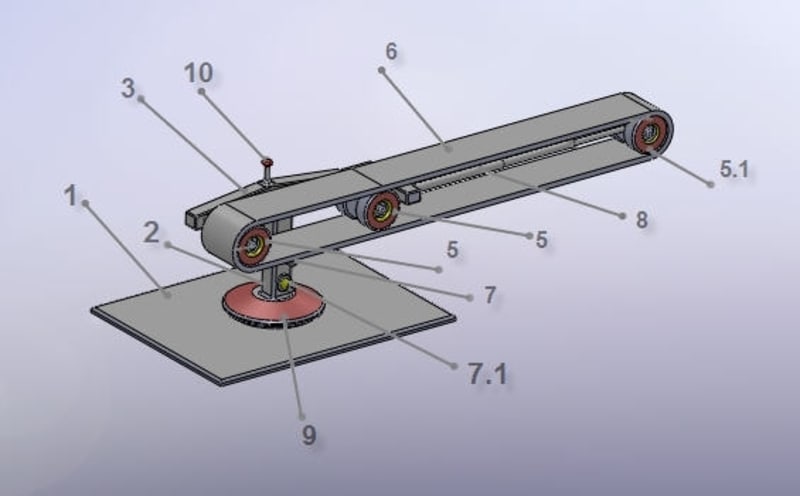
On Fig.2 Structure MCS without a magnetic tape is shown.
3. The MCS operation
The MCS starts to operate when an electric motor 7 is switched on to rotate the
lead pulleys 5. A conveyor tape moves due to a magnetic attraction contact between surfaces of a tape 6 and a leading pulleys 5. The tape tension is adjusted by a telescopic rod 8
and take-up using an autonomic electric drive gear. The pulley 5.1 has free rotation.
The direction of the conveyer shoulder in a horizontal plane can be changed by its free rotation around the axis of swivel 2 (electric motor 7.1). A swivel traverse 3 allow a conveyor tape to turn in a vertical plane by up to right angle from its original horizontal position. The speed of a tape 6 movement depends on the lead pulley’s 5 diameter and spin (revolutions per minute). The MCS can work in low, medium and high speed modes.
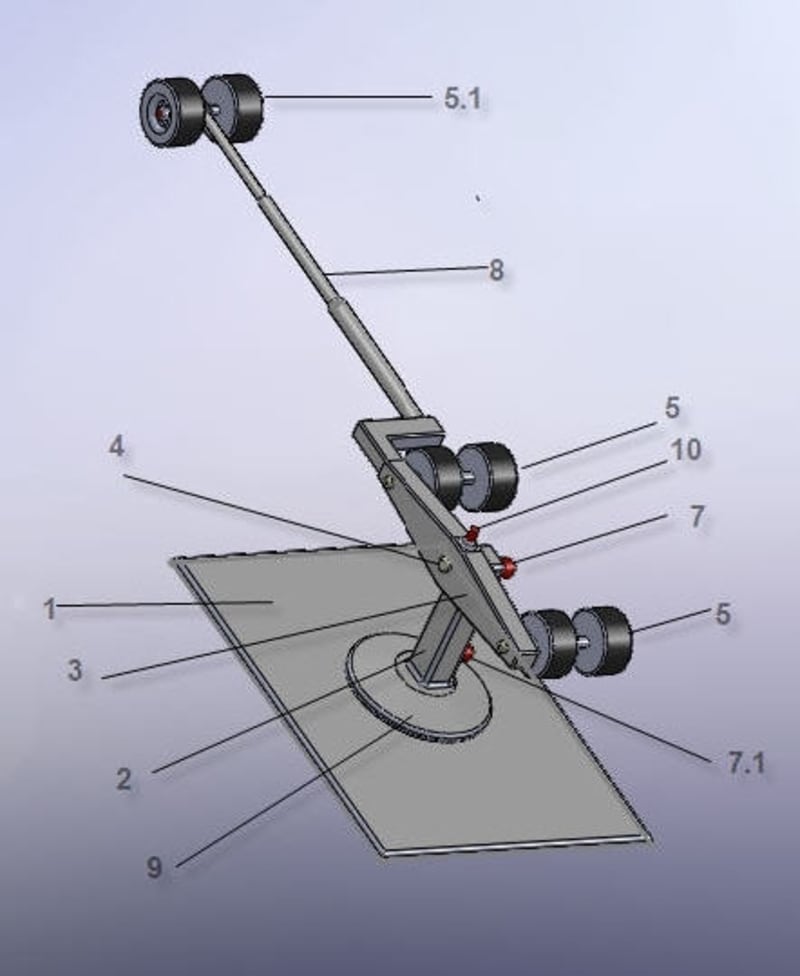
It would operate in a high speed mode to accelerate movement of flying objects, that is as a kinematic pusher mechanism. On Fig. 3 a working model is shown.
All working parameters of the MCS are included in a built-in memory (program) at a design stage and may be regulated by means of a distant or manual control board. ?
Like this entry?
-
About the Entrant
- Name:Grigori Lishanski
- Type of entry:teamTeam members:Grigori Lishanski
Oleg Lishanski
Evgeny Romanenko
Luba Chigirinskaya - Software used for this entry:SolidWorks
- Patent status:none