

The object of this project is to build a better 3-wheeled vehicle by using a virtual axis steer system (VASS) on the one front wheel of a (1F2R) trike.
This system is designed for use as an inexpensive high performance, all weather, high gas mileage, safe, 3-wheeler.
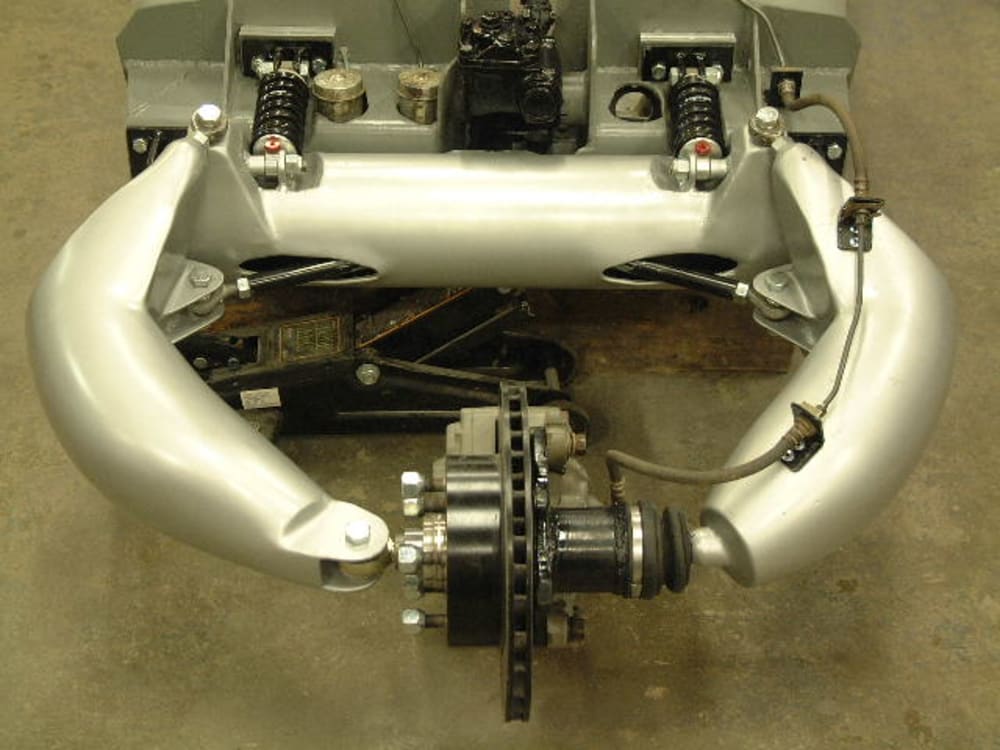
The system is made of 2 front, leading "J" arms that connect to each side of the axle and to a torque tube in the back that synchronizes the vertical movement of the 2 J arms and hence the wheel. A steering box or rack and pinion is connected to the "J" arms by tie rods that control lateral movement of the J arms.
The trapezoidal configuration of the pivot points causes the one front wheel to steer left and right and offset laterally to the opposite side of the direction of steer. So when you turn the wheel it also offsets to the outside of the corner effectively replacing the missing "loaded" wheel of a 4 wheeled vehicle to some extent. The result is the lightness, agility and aerodynamics of a 3-wheel vehicle and the stability of a 4 wheel vehicle.
Other advantages of the VASS are:
1- Low center of gravity. All the mass is at or below axle height
2- Anti dive braking. When you put on the brakes the nose doesn`t dive , it stays flat.
3- O bump steer. Vertical movement of the wheel causes no steer action, even when turned.
4- No Ackerman problems that trikes with 2 front wheels have.
5- Wheel cambers correctly when turned.
6- Very strong.
7- Good visibility. No forks and handle bars blocking the forward view.
This system replaces the forks of a motorcycle that is commonly used on 1F2R tikes with a stronger better system, making a strong, stable, safe, easy to drive trike.
The long range plan is to mass produce inexpensive fun to drive trikes for the masses.
Thanks, Don
-
Awards
-
 2012 Top 100 Entries
2012 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Don Maguire
- Type of entry:individual
- Software used for this entry:none
- Patent status:none