









We are a medical device start up called Exo Dynamics. Our first product is based on Daniel Johnson PhD work. Exo Dynamics currently has an option agreement with the University of Michigan to use the IP for further busines development.
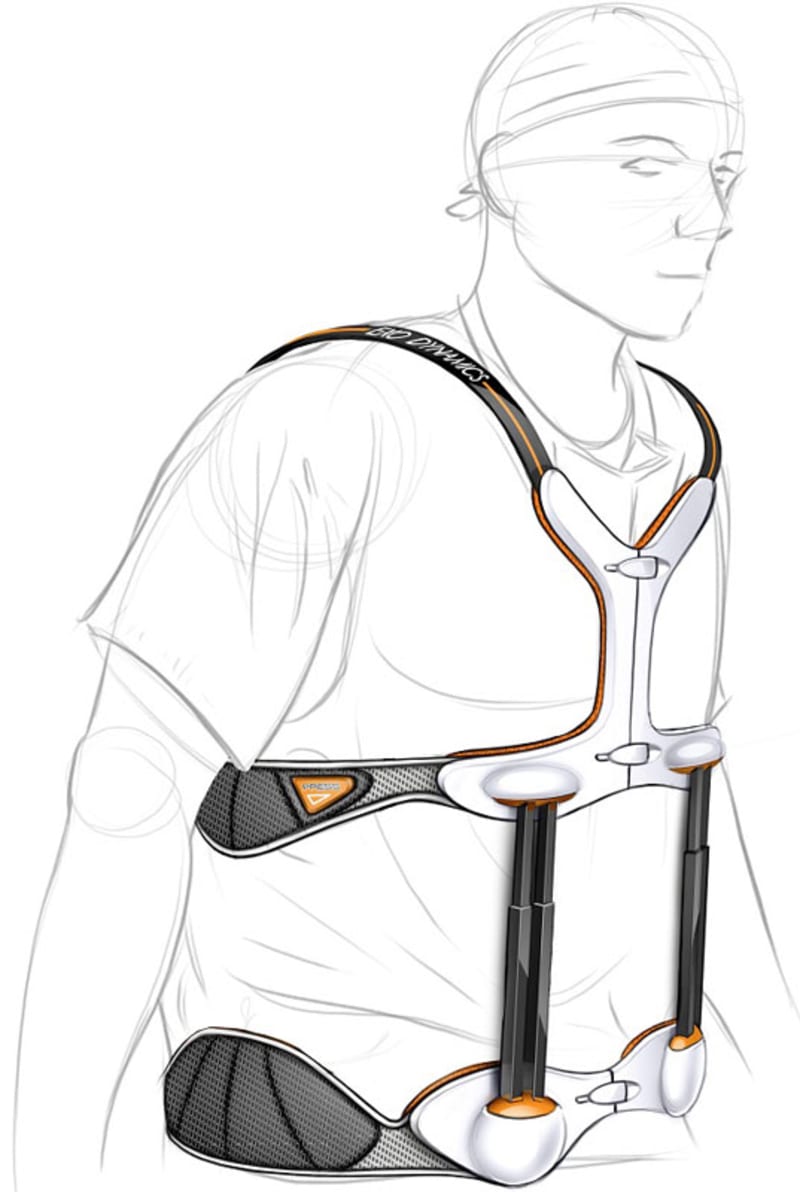
Our first product is the ExMS-1, an “electromechanically activated” back brace. Unlike current braces, our device focuses not on increasing abdominal pressure, but on transferring the weight of the torso to the hip. This gives support to the back muscles, thus reducing their effort. By changing its shape as the user moves, it allows for free motion of the user, maintaining support through a wide variety of postures, thus substantially reducing the strain on the lower back muscles and spine.
Our product is able to provide these features due to active mechatronic technology, which incorporates an electronic control system that takes input from a network of sensor elements around the back brace and then adapts the controls and actuators in real-time to maintain a pre-programmed level of support for its user. As the user moves, the orthosis tracks this motion, calculates the new parameters needed for the desired pre-programmed back support, and adapts the device accordingly.
As the patient recovers, a clinician could remotely adapt the orthosis mechanical response (range of motion, mechanical stiffness/damping) that gradually reintroduces motion while lowering support, thus leaving the patient with a more normal level of spinal mobility and reduced need for further physical therapy. Additionally the device could also be programmed with prescribed exercise routines, helping with the compliance of a patient’s treatment.
Video
-
Awards
-
 2013 Medical Honorable Mention
2013 Medical Honorable Mention -
 2013 Top 100 Entries
2013 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Jorge Sanz Guerrero
- Type of entry:teamTeam members:Jorge Sanz-Guerrero; Dan Johnson; Sam Beckett; Alejandro Catalan; James Buquet;
- Software used for this entry:Solid Works
- Patent status:pending