The main problem in the racing cars and fast moving vehicle is toppling at the time of turning. There is always a threat of toppling of a car at the time of turning a steep turns at high speed.Because of this they have to slow down at curves.
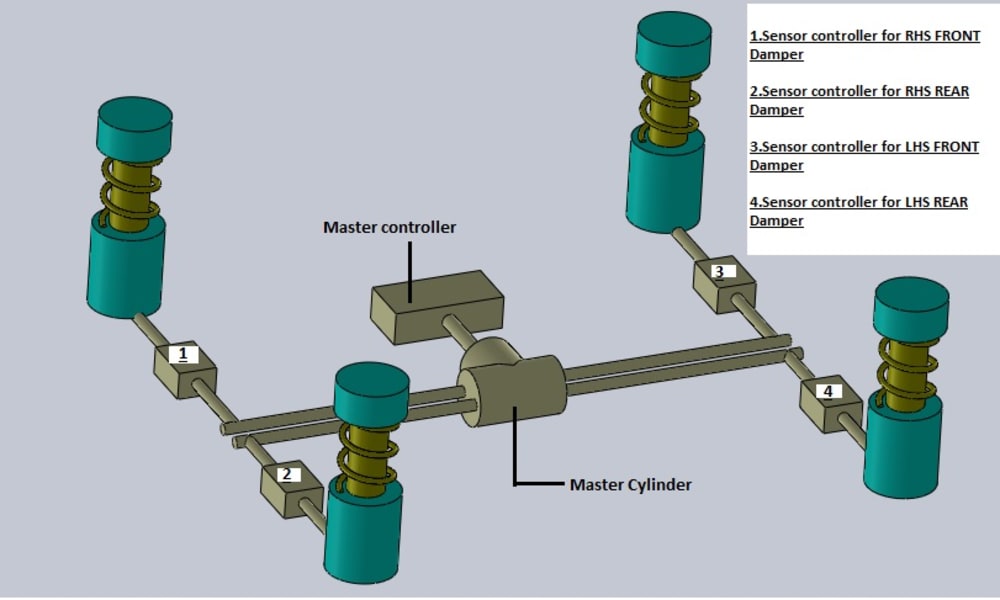
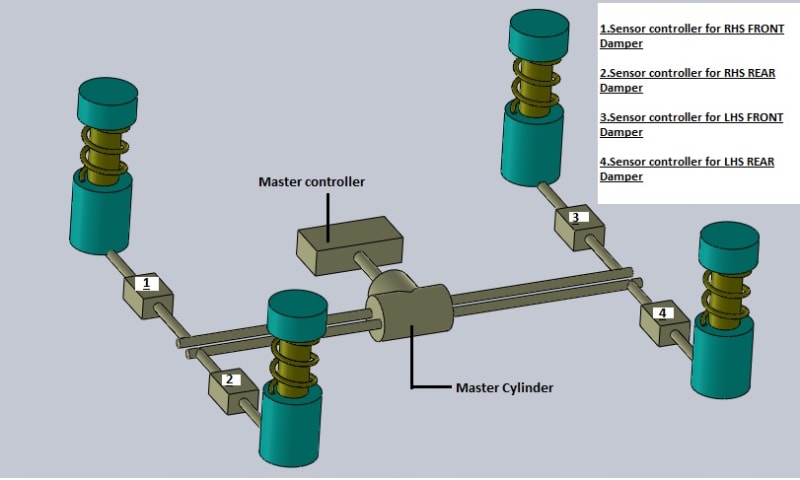
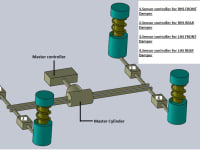
This problem of toppling occurs due to the shift of center of gravity from its mean position. The main motive of the given design is to eliminate this problem of shifting of center of gravity at the time of curves. To do so, dampers of the car has been joined to each other to form a closed hydraulic system. In this system we have master cylinder, placed in the center which controls the pressure in the dampers. Master cylinder is joined to dampers through sensor controller. The model of the system is shown.
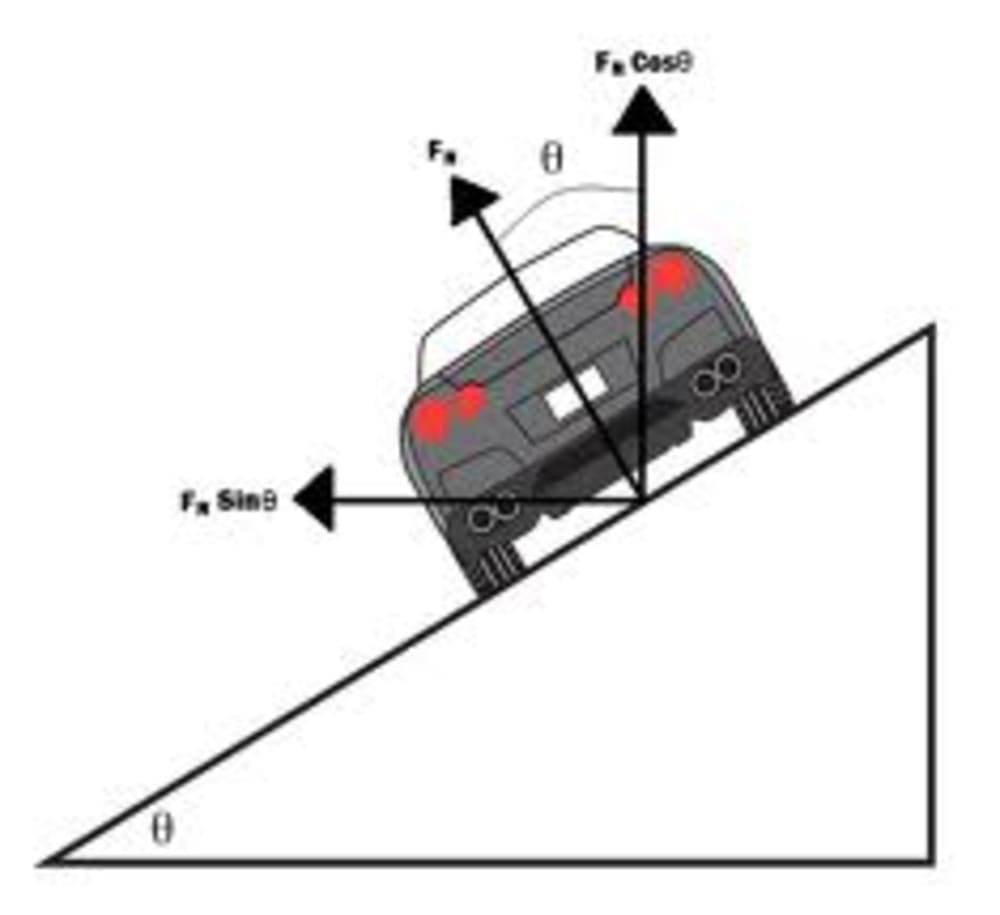
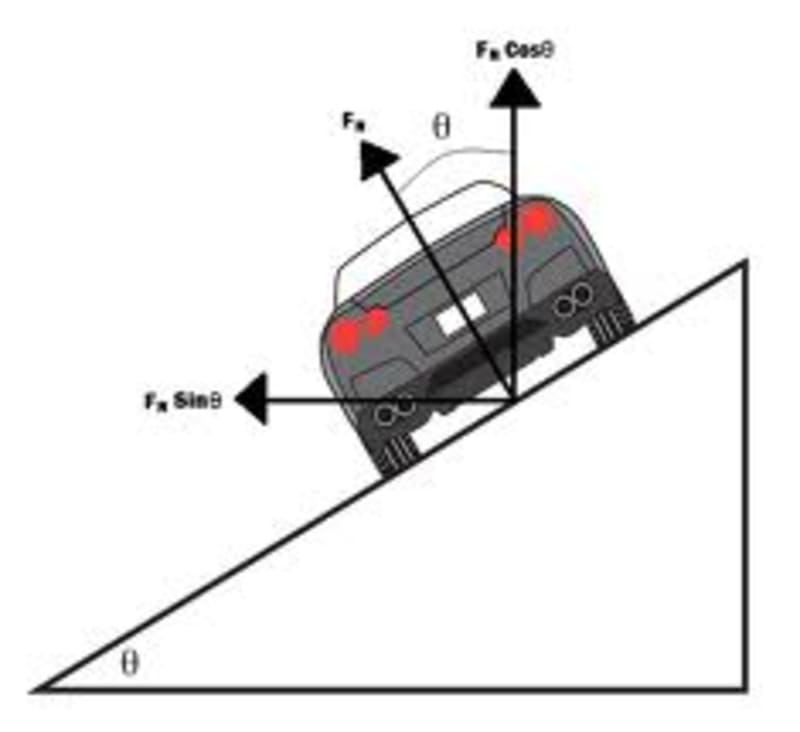
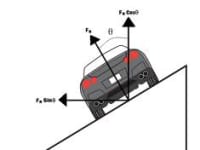
The functioning of the system is explained as: when the car takes the turn say right side then the dampers on the left side compresses down and on right side feel some relaxation. because of this the center of gravity is shifted. At this point the sensor control on left side sense the compression force applied on the damper and send the instructions to the master controller. Master controller gives instructions to the master cylinder to generate enough amount of pressure to lift up compressed damper. following the instructions the master cylinder generate high pressure with the help of the high pressure pump. This High pressure liquid generate/exert force on piston, which helps in maintaining the mean position of the damper. As the damper is maintained at its mean position the chances of toppling reduces down.At this stage car will work as if it is taking turn on inclined road as shown in pic. It may also be noted that if the curve is extremely steep turns then sensor lifts up the damper piston at more height as compared to its mean position so as to balance the toppling.
This system provides the stiffness to dampers and hinders the proper working of dampers when it is on straight road with the dings on it .To eliminate the stiffness when car is not taking turn, the Master controller is calibrated with the steering mechanism. It is timed with the motion of the steering. This system of dampers will function normally when the car is on the straight line but as soon as the car is steer in any direction the system activates itself and the dampers of the car will avoid the shifting of the center of gravity. For the proper functioning of the damper,sensor controller is provided with the back flow valve which will only be activated when car is not taking turn. This will help in maintaining the pressure in the damper. In this way car can be prevented from toppling and jerks.
Like this entry?
-
About the Entrant
- Name:Nishant Boora
- Type of entry:individual
- Software used for this entry:Solid works, Pro-e
- Patent status:none