

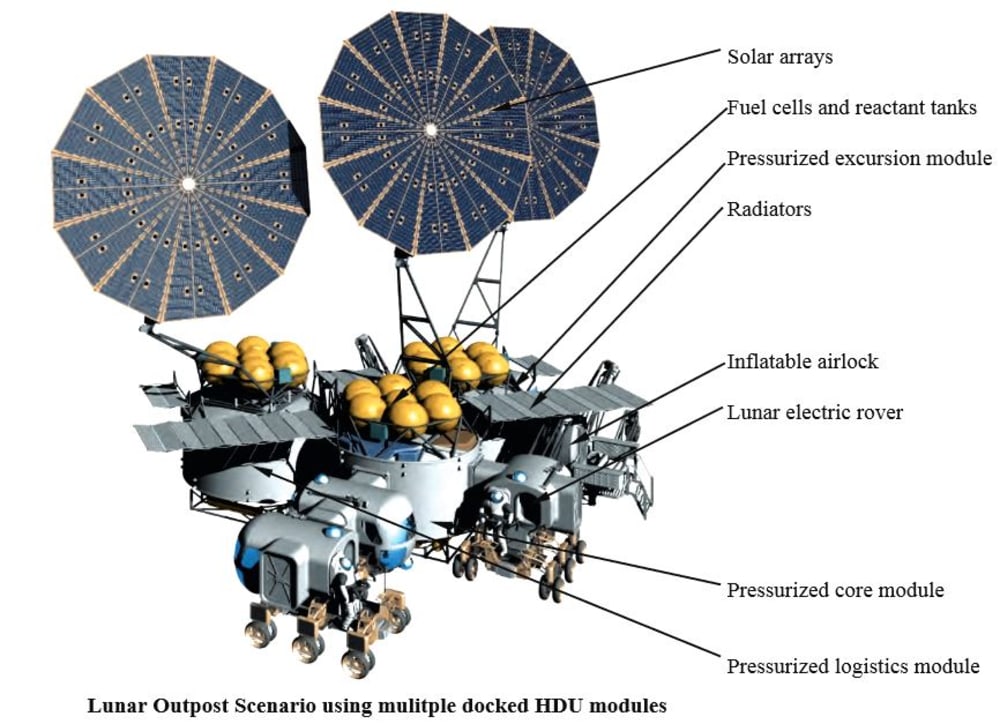


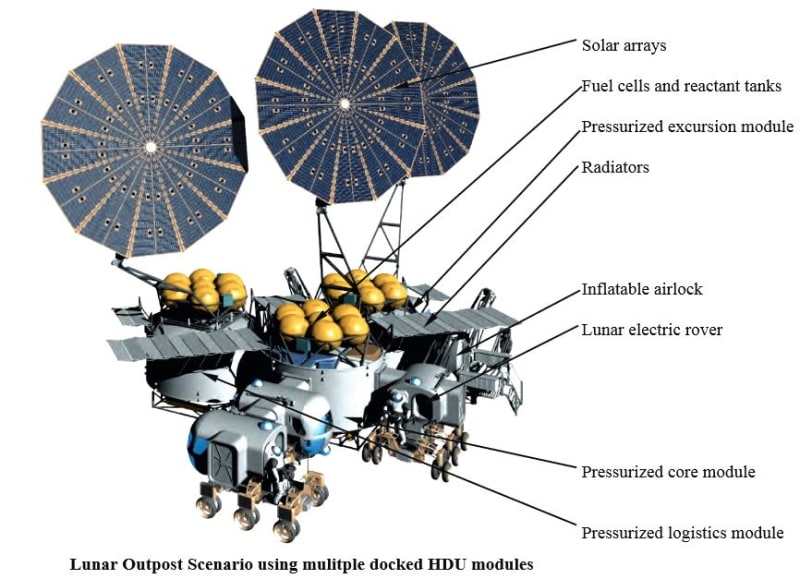




NASA's Constellation Architecture Team defined an outpost scenario optimized for intensive mobility that uses small, highly mobile pressurized rovers supported by portable pressurized Deep Space Habitat (DSH) modules that can be carried between locations of interest on the lunar surface. A compact vertical cylinder characterizes the DSH concept, where the large diameter maximizes usable flat floor area optimized for a gravity environment and allows for efficient internal layout. The DSH module was designed to be landed on the lunar surface and carried by the NASA Jet Propulsion Laboratory All-Terrain Hex-Limbed Extra-Terrestrial Explorer (ATHLETE) robotic heavy-duty mobility system. The DSH habitat modules were initially conceived as nodes with branching side ports to allow for flexible connection between neighboring modules, Lunar Electric Rovers (LER), and other modules and vehicles. All pressurized elements will have identical passive flanges, and docking will be facilitated by a pressurized 'Active-active adapter' tunnel that has the capacity to flex in six degrees of freedom to accommodate for uneven terrain, when adjacent modules are not able to be perfectly aligned, or for when settlement occurs. Three DSH modules were considered to be a minimal facility that could support a crew of 4 continuously in a permanent surface human presence. Using the same facilities, new crews of 4 would swap out every 180 days (6 months), with only short, if any, gaps in the outpost occupancy. However, the modular spatial system that consisted of the DSH vertical cylinder pressure vessels robotically placed by the ATHLETE assembler in a robotically constructed arrangement was designed to be expanded to increase habitable volume and eventually accommodate larger and larger crews.
A prototype DSH module, called the Habitat Demonstration Unit (HDU) was constructed and tested during multi-week NASA Desert Research and Technology Studies (D-RATS) analog operations tests in the Arizona desert in the years 2010-2012. The DSH prototype was fully functional, with geo-science workstation / glovebox, telerobotics workstation, general maintenance workstation, medical operations workstation, airlock, galley, wardroom, plant growth unit, hygiene facilities, and crew quarters. All aspects of the HDU-DSH could be remotely monitored via a suite of sensors that produced telemetry for power, life support, plant growth, workstation operation, video feeds, and audio feeds. During the Arizona field tests, astronaut crews would drive out into the field (lava flows, cinder cones, etc) in Lunar Electric Rovers to perform science operations, and periodically return back to the HDU-DSH module for resupply, repairs, and data collection.
-
Awards
-
 2014 Top 100 Entries
2014 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:A. Scott Howe
- Type of entry:teamTeam members:Scott Howe
Kriss Kennedy
Tracy Gill
Terry Tri
Larry Toups - Software used for this entry:SolidWorks, Form-Z
- Patent status:none