



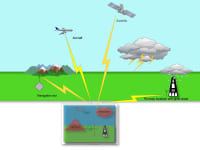


The Vision-Enhanced Situational Awareness (VESA) system is a situational awareness system for small general aviation aircraft that incorporates enhanced and synthetic vision, augmented reality, data fusion, and other technologies to provide a continuous display of the pilot’s surroundings fused with important flight information. The VESA system conceptual design was developed as a capstone design project of the Johns Hopkins University Master of Science in Systems Engineering Program.
The overarching objective of the design effort was to conceptually design the VESA system as a next generation situational awareness system for general aviation. Some supporting objectives of the project included the following:
• Achieve sufficient enhanced flight visibility to enable pilots to continue instrument approaches where visual contact with the runway would normally be required.
• Leverage emerging technologies to produce a system with capabilities beyond what is currently available in avionics markets
• Enhance aviation safety by developing a system that will alert the pilot when the aircraft is approaching hazardous terrain, other aircraft, and other hazards.
• Focus on general aviation community, a sector of the aviation community that is more susceptible to pilot error and size and weight limitations than air line or military operations. Coincidentally, focusing on the general aviation sector limits complexity of the system and project.
Using a systems approach, the integration of new technologies in enhanced vision, digital avionics, augmented reality, and aircraft identification can significantly improve pilot situational awareness. Aircraft accidents due to poor visibility, Controlled Flight Into Terrain (CFIT), spatial disorientation, runway incursions, and mid-air collisions can all be reduced as a result of VESA. The system also has the potential to improve instrument approach capability, thus reducing the number of flights cancelled or diverted due to weather.
The system has one primary and two secondary capabilities:
1. Landing in zero visibility (primary capability)
2. Instrument navigation
3. Emergency aid for Visual Flight Rules (VFR) pilots
The functional architecture of VESA is designed to perform numerous real-time functions in parallel. Particular focus is placed on discriminate functions, which allow VESA to identify runway hazards and hazardous terrain. Diagnostic functions are
performed continuously with longer cycle times than real-time functions to conserve processor work load. Physical Architecture
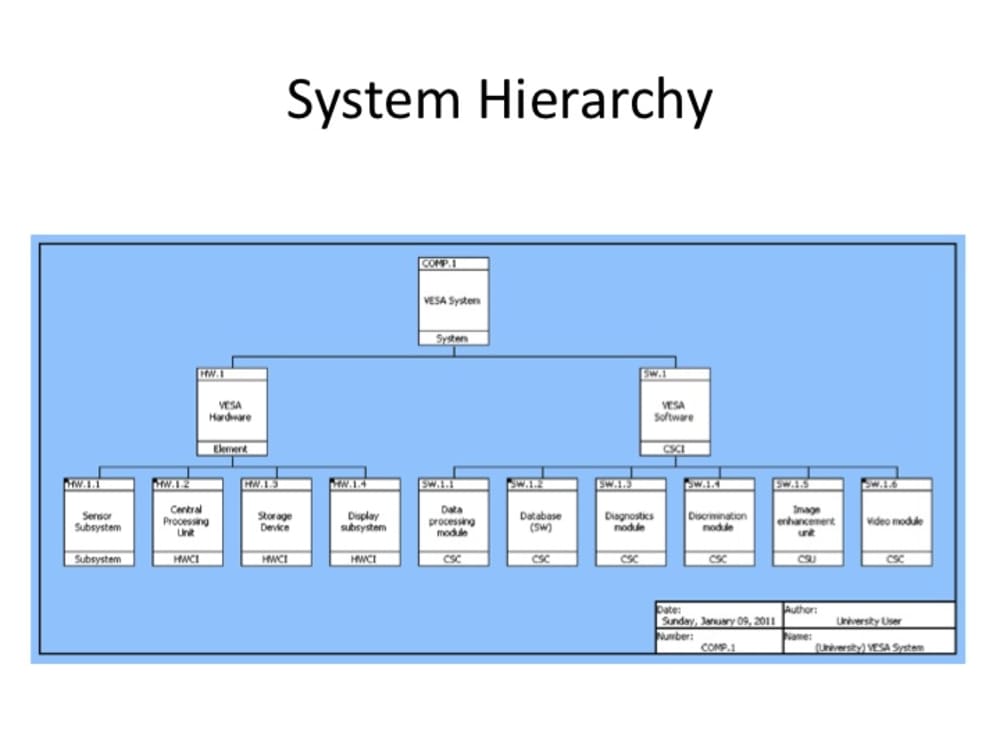
The physical architecture of VESA is structured into one hardware module and one top-level software module. The hardware module is in principle a computer consisting of an input system (a sensor subsystem or array), a central processing unit, a storage device, and an output module (display). The software module is based on a structured modular approach with the intent of running numerous parallel real-time functions.
As the VESA system is the result of a conceptual integration of existing technologies, most of the hardware consists of available Commercial-Off-The-Shelf technologies that can be procured. Some miniaturization of existing products and technologies may be necessary or desired. The processors and software perform the data handling, image processing, and data fusion functions of the VESA system and as such would be the focus of the development effort.
Like this entry?
-
About the Entrant
- Name:Andrew Pollard
- Type of entry:individual
- Software used for this entry:Vitech Core, ConceptDraw
- Patent status:none