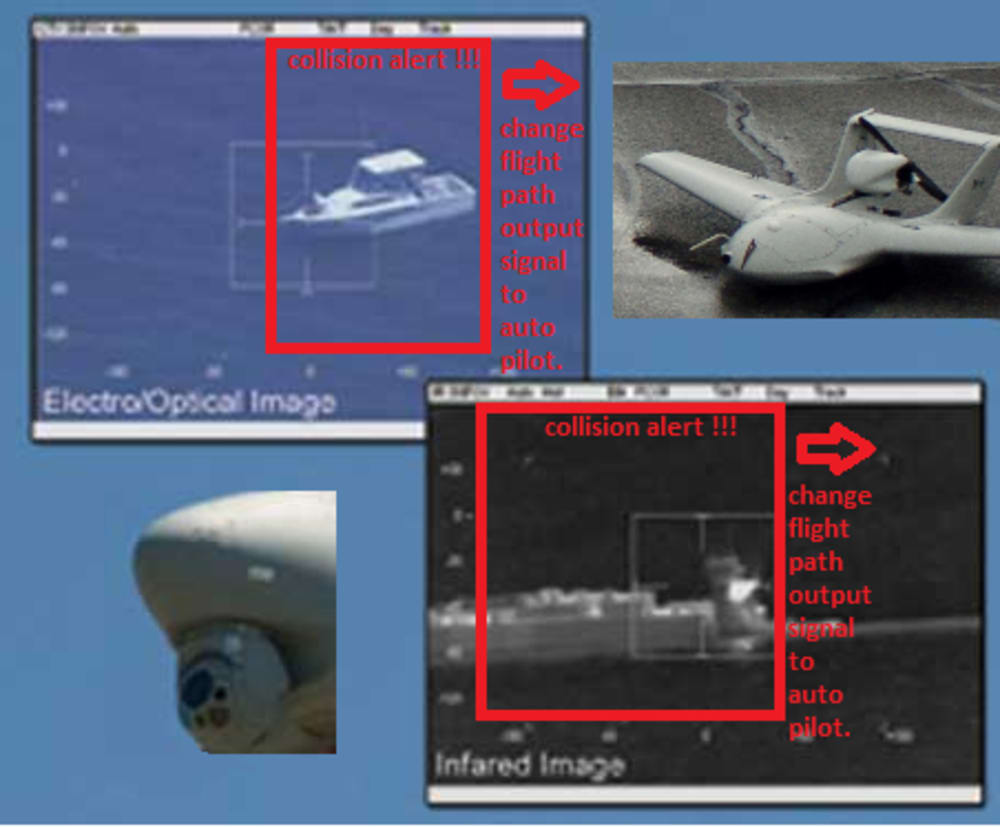

The MACAS-UAS will use the installed electro-optical and infrared sensor units, common devices installed to today’s military-security UAV/UAS and future civilian UAV/UAS, that conduct or will conduct maritime operations.
During emergency conditions such as a loss of remote control signal-malfunction-damage of a critical system-no more fuel-ditching procedure, the electro-optical and infrared sensor unit inputs will be processed by image processing software, which will automatically provide basic emergency inputs to the autopilot of the UAS/UAV, when a possible obstacle will be detected and its course will be tracked, inside the initial UAS ditching flight path. The automatic flight path change action of the UAS will result to the minimization of the possibility of a collision with a ship or any object (preferably with a heat signature) different than sea or air, during ditching procedure.
The MACAS-UAS will use battery power under emergency conditions.
All the signal lights of the UAS will be pulse flashing during this procedure.
Similar technology already exists (see TCAS for UAS/UAV successful testing and Air Defense Artillery targeting systems).
The MACAS-UAS can be adapted to ground operations (a more challenging task because of the numerous and different nature EO-IR patterns that the image processing software will have to filter and assess).
Like this entry?
-
About the Entrant
- Name:Panagiotis Katsoudas
- Type of entry:individual
- Profession:
- Number of times previously entering contest:1
- Panagiotis's hobbies and activities:ASD industry, UAS airworthiness, astronomy
- Panagiotis belongs to these online communities:SAE, RAES, SFTE
- Panagiotis is inspired by:ASD industry trends and products
- Patent status:none