
Air transportation of goods is the fastest mean of distribution; for difficult access areas it is also the most convenient way of transporting some products, especially perishable ones. Yet it is also a very expensive way of transportation.
The idea is to make air transportation of goods affordable to the majority of people. This will be done by designing a fully autonomous aircraft with a payload in the range from 100 to 250kg. This aircraft will have no need of human intervention during normal operation, and will offer a cheap alternative to distribute products to small towns, villages and difficult access areas.
The aircraft will have a short takeoff/landing system which will allow it to operate from small strips of land. No special facilities will be needed for operation. Loading and unloading will be done manually using a container, which will fit in the fuselage of the aircraft.
Navigation of the aircraft will be done point-by-point using a satellite positioning system (as a GPS GLONAS, or both) and an autonomous control system. For takeoff and landing, a fully autonomous system is being developed; to locate the takeoff/landing strip only the coordinates of a reference point and the heading of it are needed.
This aircraft should not interfere with normal aircraft operations. To accomplish this, it will fly at low heights (~500ft above ground level) using a radio altimeter, and information of the GPS to avoid major obstacles.
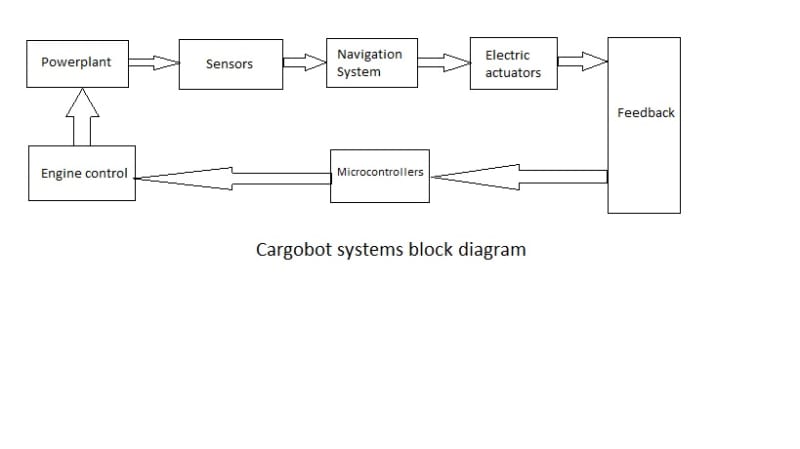
The avionics
The autonomous control system will be Flight Management System (FMS) based, and the control surfaces will be operated by an autopilot which will use as inputs data from sensors as: GPS, Radio Altimeter and accelerometers. No ADC is necessary. Using radio altimeter, the autonomous aircraft could fly up to 750 m (Radio Altimeter Limit) over the terrain far from airports. A flight plan will be introduced in the FMS by an operator and the Cargobot will start fully autonomous operation when commanded. Additional electronics will be introduced for automatic take offs and landings.
Additional software and radios will be installed for manual control for abnormal operations as FMS failure, bad weather, etc.
The powerplant
The Cargobot will use a reciprocating engine with a propeller for propulsion. Auto-throttle will provide power control, and a variable pitch propeller will be used to keep fuel burning at a minimum.
The cargo compartment
The cargo compartment will be designed to minimize the movement of the gravity center between fully loaded and unloaded aircraft. A container will be used to easily load/unload the Cargobot.
A refrigerated container could be used to transport perishable goods (Ex. flowers, plants, fresh food, etc.)
Safety
The waypoints and legs will be programmed to avoid flying over inhabited areas. The aircraft will be monitored remotely during all flight stages.
Like this entry?
-
About the Entrant
- Name:Jesus Lopez
- Type of entry:teamTeam members:David Cisneros - Co-worker
- Software used for this entry:ANSYS Fluent
- Patent status:none