


A Snake's body is very flexible to travel through challenging paths even there are complex obstacles. Snakes uses different methods to do this such as undulatory/serpentine, Side-winding, Caterpillar, Concertina locomotion.
What is Snake Hand?
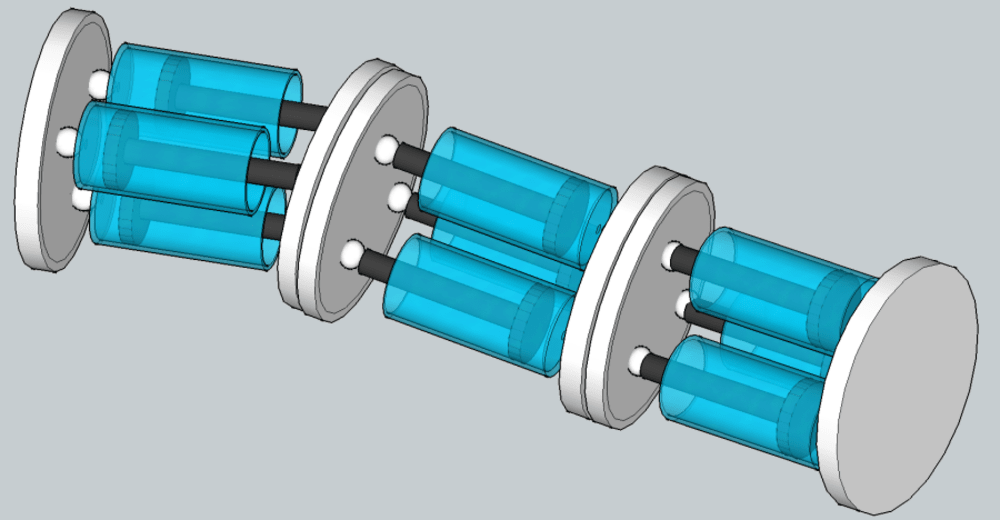
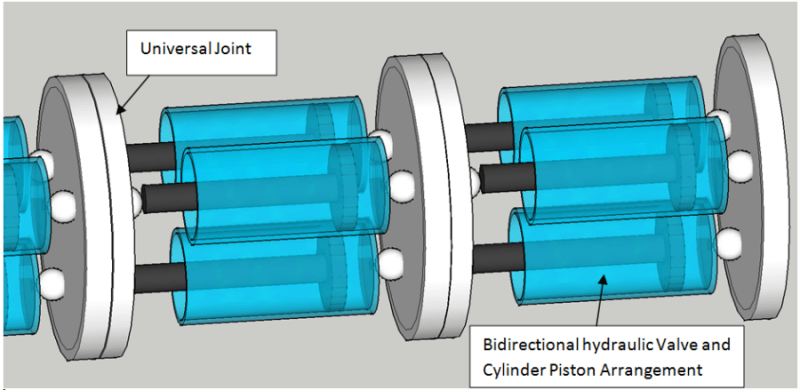
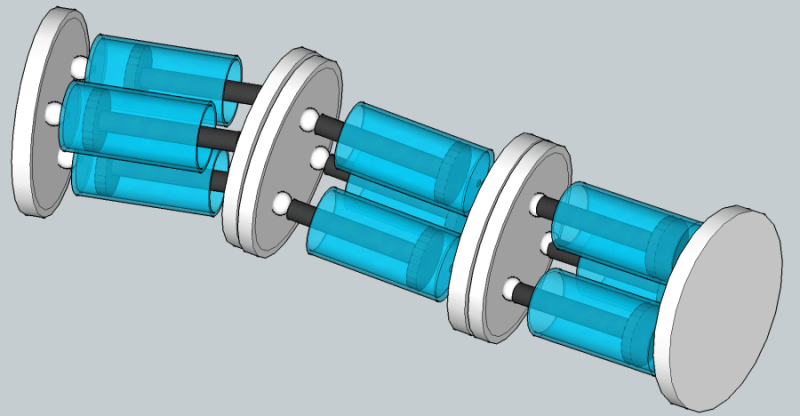
Snake hand is a lengthy hydraulic robot with a controlling base station. The robot can simulate complex snake motions to travel easily through complex paths. Thee robot is constructed by integrating a number of identical units called Control Segments. The major components of a Control Segment are as follows:
1, Three bidirectional control valves with piston cylinder arrangement as shown in the figure.
2, Universal joints for complex twist simulation
3, Electronic control unit with various sensors for navigation and hydraulics
The base station contains a central controller and hydraulic system to power up the robot. We can easily add or remove Control Segment to adjust the length of the robot.
The base station remains stationary and the length of a Snake Head can be configured based on its application.
Advantage over existing snake robots:
* Robot head can attach different application tools such as cutter, welder, testing tools, lethal weapons, camera etc.
* Low operating noise as it uses hydraulic system
* "Amphibian robot" since it can move easily in both water and land
* High Power to Weight ratio
* Capable of simulating complex snake motions
* Base station provides seamless and continuous hydraulic power
* Easily scalable as it uses identical joints and control segments
Applications:
This robot can be manufactured in 3 different categories based on size and applications.
Small Scale (Less than 5 meters):
* R & D
* Spy Robot for military Applications
* Medical Applications
* Personal care
* Entertainment applications
Medium Scale (4 meters to 20 meters):
* Repair of underground pipes, tunnels
* Wreckage surveillance
* Reaping of fruits from complex trees
* Fire fighting robot
* Space exploration
Large Scale (More than 20 meters):
* Substitute for Armored Vehicle Launched Bridge
* Earth Quake Applications
* Defense Technology
* Space technology (repair of space vehicles and satellites)
Like this entry?
-
About the Entrant
- Name:Roy John A G
- Type of entry:individual
- Software used for this entry:Sketchup, Office Suite
- Patent status:none