

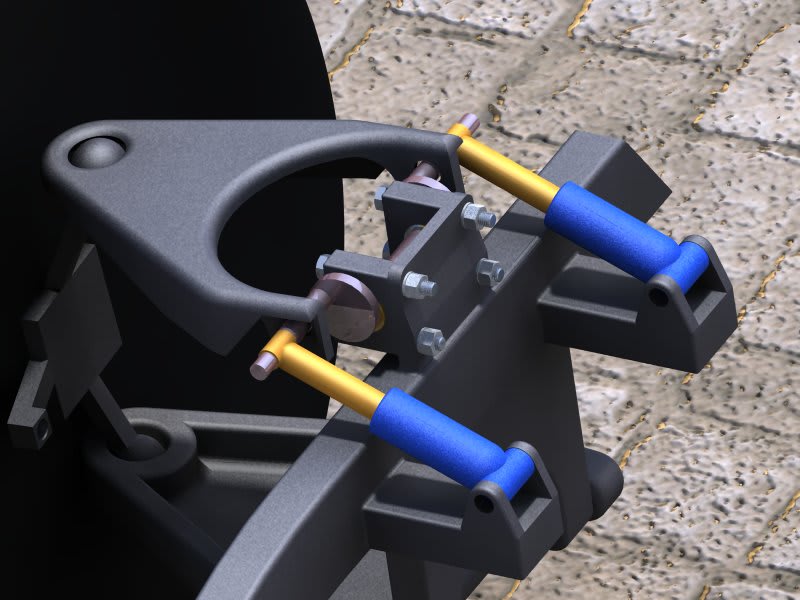




The accuracy of multi dimensional simulation of vehicle dynamics has been significantly increased for both passive and active vehicles which are equipped with advanced electronic components. Recently, one of the subjects that has been considered is increasing the car safety in design. Therefore, many efforts have been made to increase vehicle stability especially during the turn. It is also very important in three wheel cars. One of the most important efforts is adjusting the camber angle in the car suspension system. Camber angle, as well as the vehicle stability, has major effects on the wheel slip, reducing rubber abrasion, acceleration and braking. Since the increase or decrease in the camber angle impacts on the stability of three wheel vehicles, in this paper, a car suspension system mechanism is introduced by which camber angle could be adjusted. Furthermore, the mechanism is user friendly and also economic.
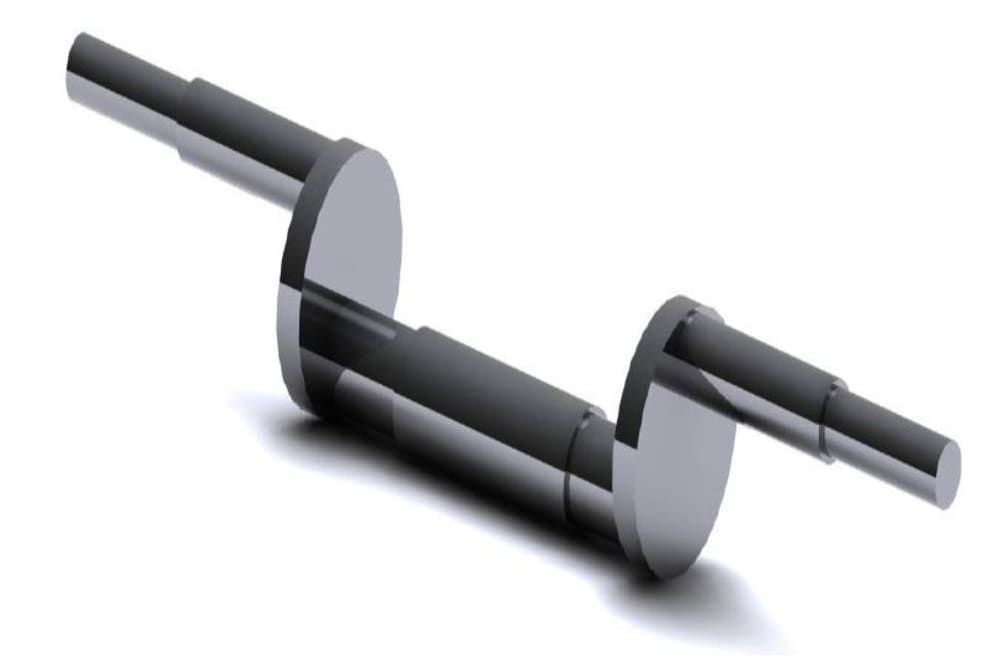
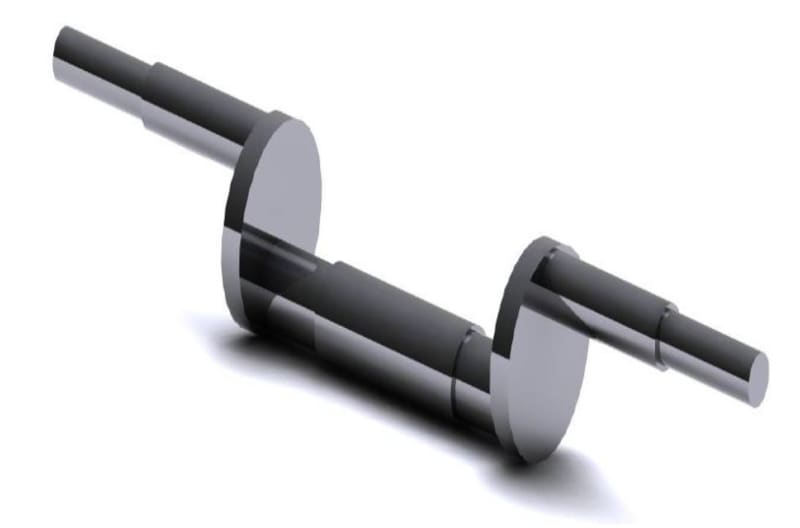
A passive double wishbone suspension system with variable camber angle has been designed, analyzed and subsequently manufactured. This mechanism was modeled in Visual Nastran software and kinematic analysis was presented. It can change camber angle from -5.5 to 5 degrees. In this work, two different modeling are presented, active geometry system (variable camber) and passive (conventional suspension system) then the rate of Roll and Yaw angle were discussed to investigate and compare models stability in same condition. Simulation and test results have shown that vehicle stability in active geometry model is sustained more than conventional models.
Like this entry?
-
About the Entrant
- Name:Mohammad Iman Mokhlespour Esfahani
- Type of entry:individual
- Patent status:pending