


Wheeled vehicles move well only on smooth solid terrain. On soft ground, wheels slip and are bogged down depending on the ground softness, wetness, wheel diameter, etc. They have low efficiency on soft ground, because wheels have higher compactive resistance and low drawbar pull compared with tracked vehicles. Besides, wheeled agricultural machines, such as tractors, have limited use, since they compact newly digged soil and damage grass due to higher pressure of wheels on ground. The tracked vehicles on the other hand have large contact area on ground and consequently less pressure on ground, higher drawbar pull and lower compactive resistance, but they have lower speed, lower maneuverability and they damage the ground when steering.
The proposed walking wheel is intended to use as a compromising solution between wheel and track movers for off-road vehicles, such as all-terrain, agricultural, construction vehicles moving on clay, grass, digged soil, sand, etc. when there is a need for moderate drawbar pull, lower compactive resistance and higher speed, better manoeuvrability, higher efficiency at the same time.
The walking wheel can be well used in trucks too for fuel economy, because it has lower rolling resistance on road compared with pneumatic tires. This is obvious, because rolling here takes place between metal wheel (bearing) and metal surface of the grip. Though there are also sliding frictional and rubber compression/decompression losses here, but they are insignificant compared with tire rolling losses. Besides, additional tractive effort of this mover will contribute to safety of trucks.
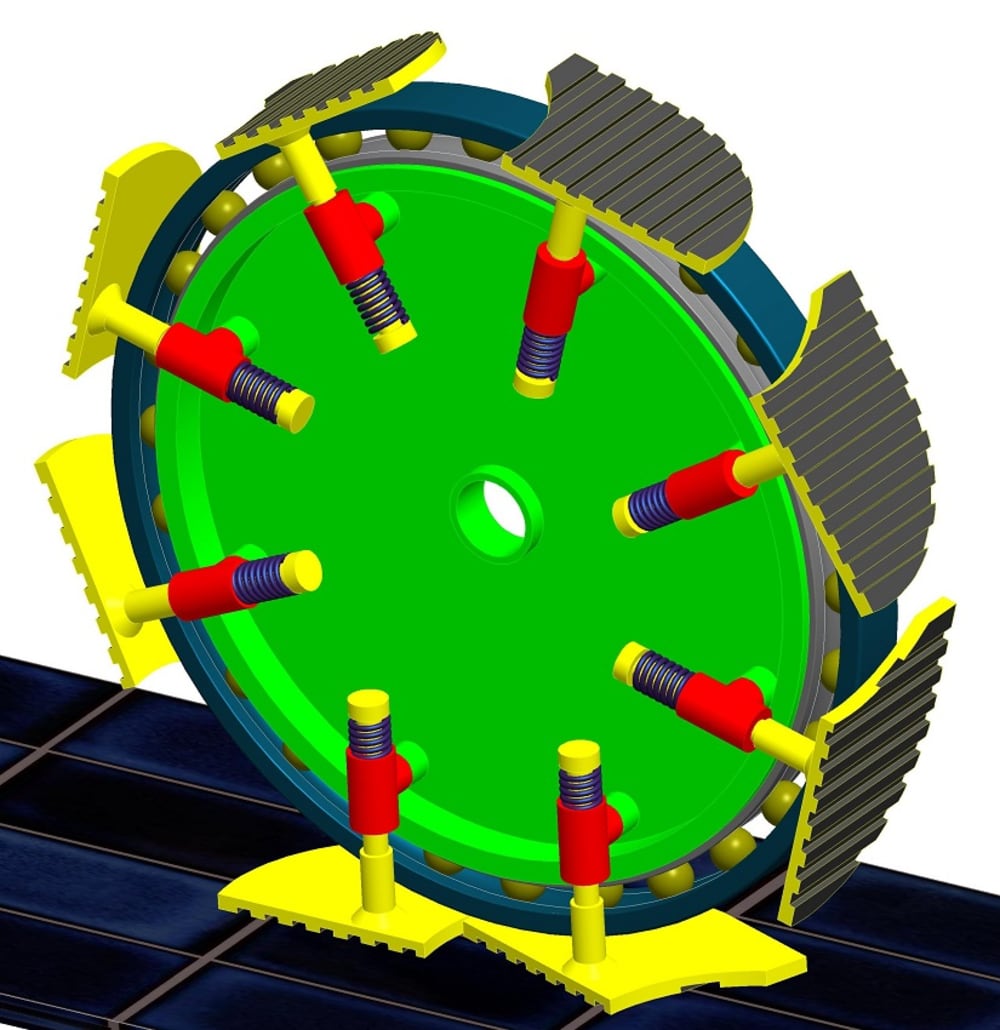
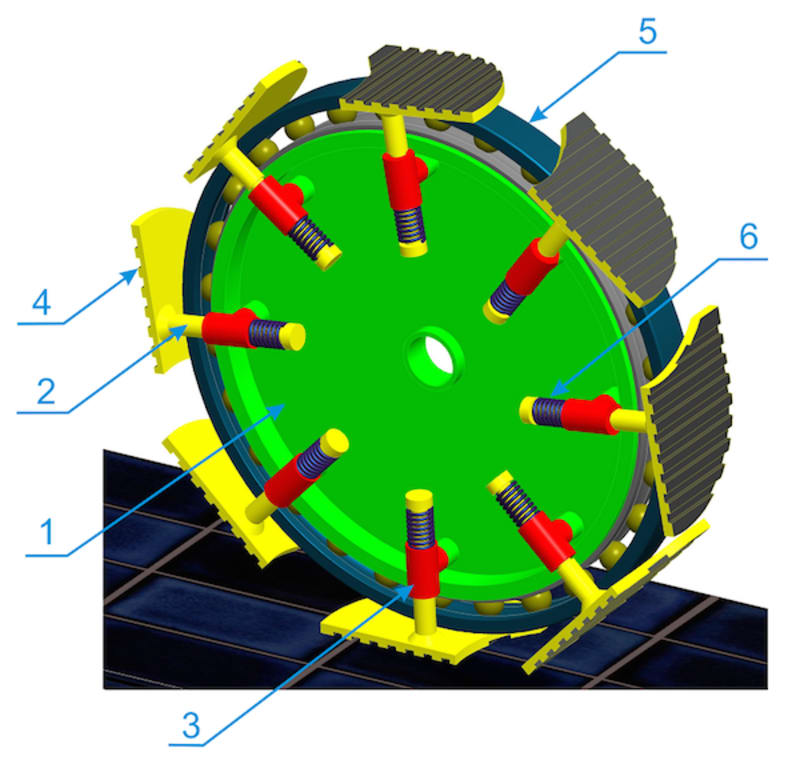
The walking wheel operates in the following way (see animation):
The wheel (1) rotates legs (2) through hinge guides (3) so, that the legs can both slide and rotate in the hinge guide hole. They can rotate about the holes of wheel as well through hinge guide. Thus the legs have 3 degrees of freedom. The grips (4) are rigidly connected to legs. When a grip gets in touch with a ground, it gradually rotates relative to wheel with its leg and hinge guide until the wheel rolls on its upper metallic surface through the bearing (5) and its bottom rubber layer fully touches ground at the same time. Without the bearing, the wheel will slip on the grip upper surface causing frictional loses and intensive wear. When a grip leaves ground, it is pushed together with leg by spring (6) and gets in firm contact with bearing, which eliminates its linear, tilting and steering movement until it contacts with ground again. The proposed walking wheel can easily steer about a landed leg, since the legs can rotate about hinge guide hole, which is already discussed above and besides, the grips have special shape for preventing interference between two adjacent grips during steering process (see picture 2).
Video
Like this entry?
-
About the Entrant
- Name:Varuzhan Harutyunyan
- Type of entry:individual
- Software used for this entry:Pro/ENGINEER Wildfire 5.0
- Patent status:pending