







There has been much research carried out in both academia and industry about pedestrian detection based on visual processing. The pedestrian or cyclist is exposed to a lot of danger on the street as reflected by statistics collected all over the world. To enhance the safety of the pedestrian or cyclist there have been many breakthroughs in computer vision research and the rapid growth of demand in its applications to actual vehicles. However, the reliability and the robustness of vision algorithm are still very much in doubt to improve the safety of pedestrian or cyclist for any environment. Most computer vision-based algorithms are complex in nature which causes the cost issue for the vehicle manufacturers or the end user, while most of those are for use in day time under overcast weather conditions– as the functionality drops significantly in night time, raining or both conditions.
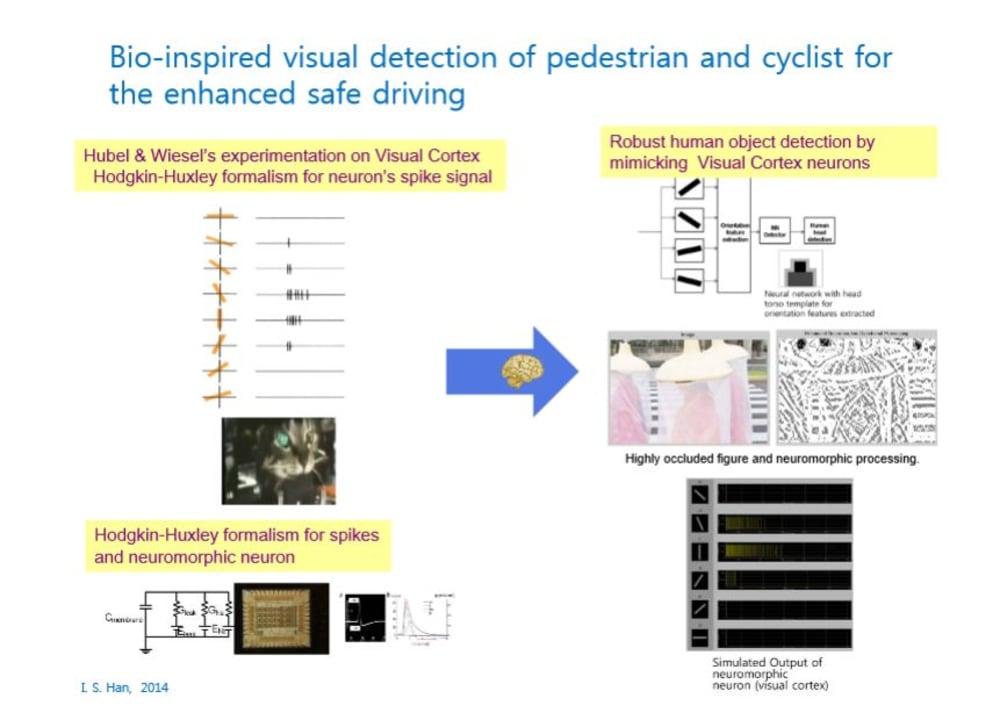
The design idea from the orientation tuned spiking neurons of visual cortex, can mimic the human or animals’ visual intelligence of recognizing any particular objects under the extreme visual environment. The detection or recognition of human objects is primarily exploited for the advanced safety and driving assistance, to achieve both the low cost practical implementation and the robust functionality at dark or wet day.
The effectiveness of proposed neuromorphic visual processing system is evaluated for the safety enhancement via the 98% of pedestrian or human object detection rate for alerting the vehicle driver to avoid the risk of pedestrians’ safety due to the human errors. The market growth rate of advanced driver assistance system is about 28% per annum, where the visually detecting sensor becomes the more essential design from EuroNCAP’s new standard. The proposed idea has the advantages of not only the robustness of illumination changes from day to night but also the solution to detect the pedestrians or equivalent coming-in from the road-side.
The neuromorphic pedestrian/cyclist detection was successfully evaluated based on the video data sets captured for different environments from various locations.
The design idea is proved for the VLSI ASIC as a cost-effective and reliable device, with an early prototype, which can also be integrated as part of sensor. Or the neuromorphic vision can be implemented as algorithm into the computing platform or mobile ICT devices. For various manufacturing methodologies are eligible, the bio-inspired visual detection of pedestrian and cyclist will give the variety of opportunities to improve the road safety and advanced driver assistance system of automotive vehicles, by avoiding the risk of accidents.
Like this entry?
-
About the Entrant
- Name:Il Song Han
- Type of entry:individual
- Software used for this entry:MATLAB, SPICE, HDL
- Patent status:pending