





Classical industrial robots need actuators to be as stiff as possible for placement speed, accuracy and delivering high force. With robotics now moving into applications that require greater adaptability for handling soft or fragile materials and for avoiding injury when working with humans, robotic actuators are increasingly required to offer controlled compliance. With existing technology this is typically realized with fixed or adjustable elastic elements such as springs coupled with complex mechanisms and sophisticated controls. Active Signal Technologies' OFact performs mechanically as an electrically adjustable linear spring, or adjustable compliance, thus eliminating the need for these measures.
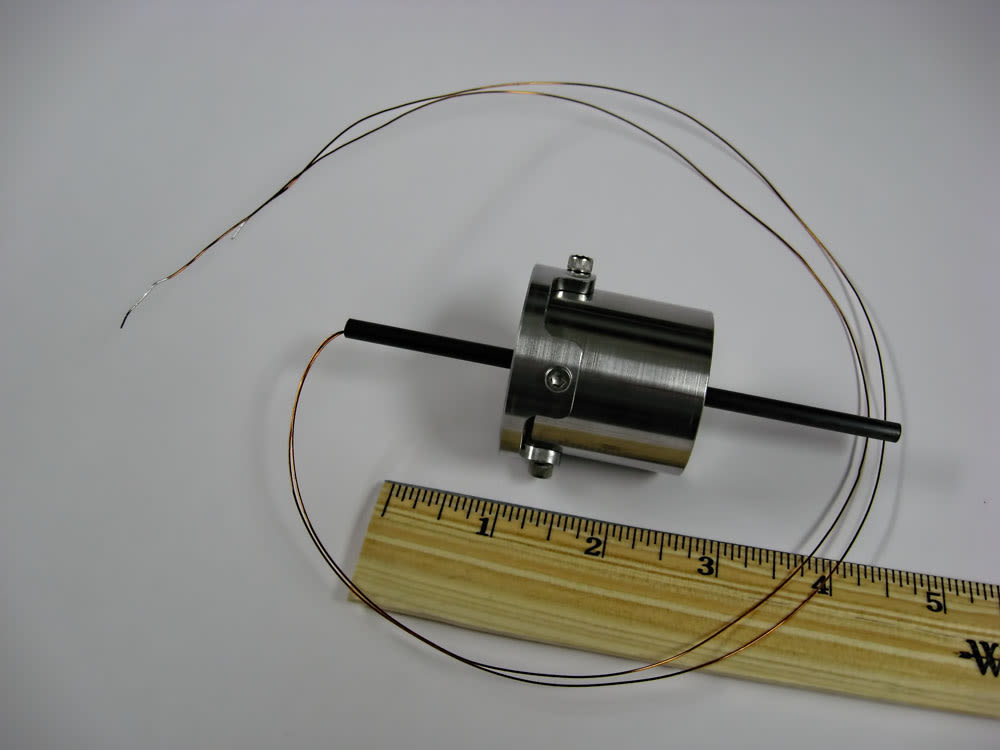
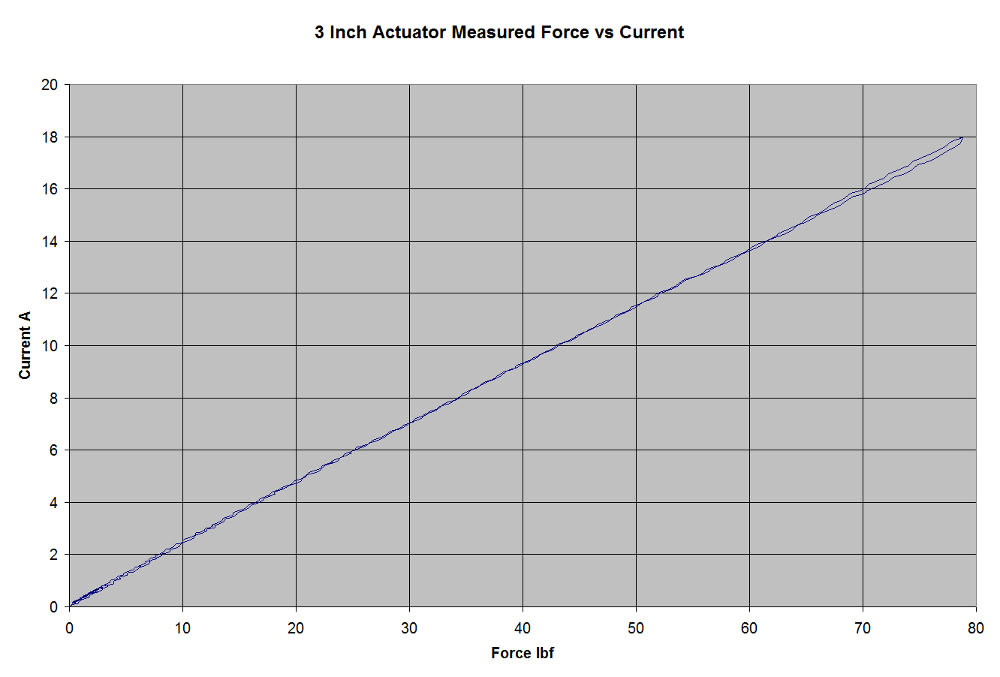
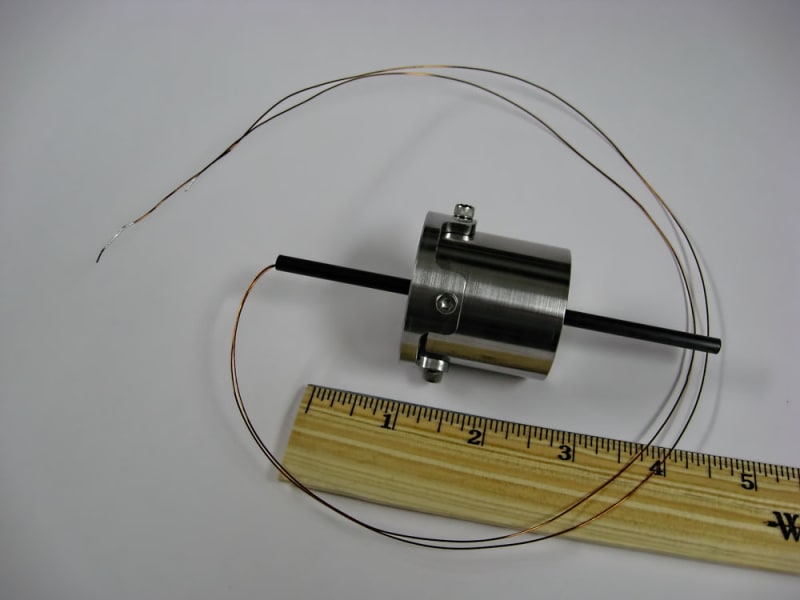
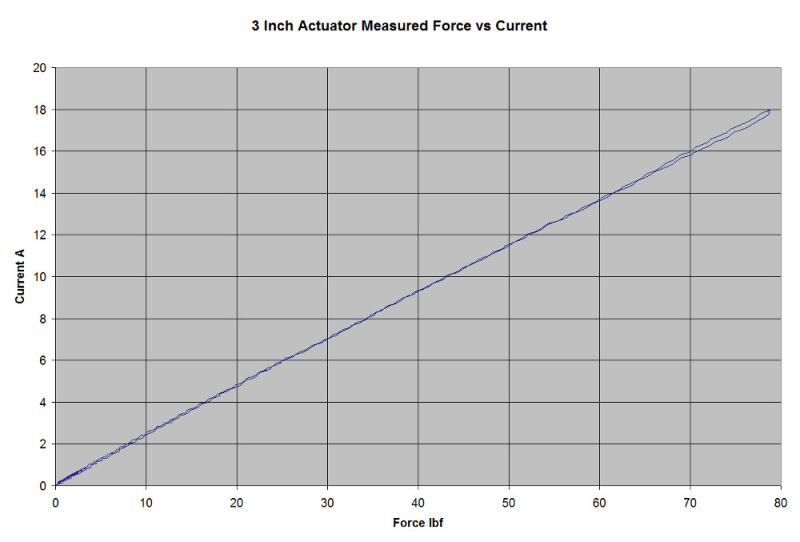
The OFact is a direct linear electromagnetic actuator that outputs force proportional to applied current and constant force across the actuation range for a fixed drive current. The force is completely bidirectional acting equally in either direction when the polarity of the drive current is reversed. In addition, high intermittent forces can be applied anywhere along the actuation range and outstanding force resolution has been measured across more than three decades of current. The force capability is only limited by internal heat dissipation and the structural limits of the actuator. The moving section of this actuator is a single component and when power is removed the actuator motion is completely unimpeded. The failure mode is therefore neutral and non-jamming. Its frequency response is typically greater than 50Hz and can extend to 200Hz with appropriate design. A 1.5” long x 1.5” diameter and a 3” long x 3” diameter prototype have been tested. The latter weighs 4.62 pounds, has an actuation stroke of 15mm, and generates 4.44 pounds of force per Amp of drive. It is easily capable of generating more than 150 pounds of force for short periods.
This device offers significant potential for both human-robot interaction and untethered ambulatory applications. For the former it could be used for remote control haptic feedback taking advantage of infinitely variable force output to feed back the sensation of remote actuation forces to the operator. For robotic ambulation (leg stride) the actuator can seamlessly and quickly transition from high impulse force to neutral swing (total compliance) and back again without complex control mechanisms. Active Signal Technologies is also considering the OFact as an electrical substitute for hydraulic actuators in certain UAV and small passenger aircraft as well as in direct drive control of hydraulic servo valves. In this application it offers compact form factor, high frequency bidirectional proportional operation and high intermittent forces to overcome chip shear.
Device manufacture is straightforward because the mechanical design is very simple, the part count is low and high permeability materials are not necessary. In addition it does not require finely toleranced magnetic gaps, and is relatively insensitive to misalignment of the internal magnetic elements.
-
Awards
-
 2014 Top 100 Entries
2014 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Dennis Kohlhafer
- Type of entry:individual
- Software used for this entry:MagNet
- Patent status:pending