



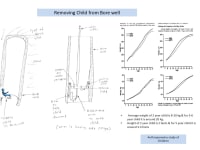
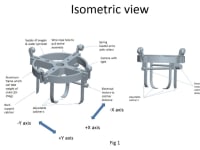
Brief description from Fig 1 (In attachment)
1) Aluminium fabricated frame has four adjustable catchers which are mounted on a lead screw. This lead screw is rotated with the help of 2 stepper motors +/ - X axis & +/ -Y axis , which can be powered by a Lithium battery mounted on an aluminum frame.
2) 4 Rollers which are mounted at four locations are spring loaded with pivot joint, these rollers help this Robot to stabilize its position when it is going into bore well.
3) A Camera with light is also mounted on the aluminium frame to get a view of the bore well when the robot is inserted into the bore well. This will also help to search for trapped child fallen into the bore well.
4) Also this frame is mounted with oxygen & water sprinkler this will help trapped child to enhale fresh oxygen, water sprinkler will use if child is unconscious. water is sprayed on child.
5) This whole assembly is hung with the help of metal wire rope & chain pulley.
Working of robot:
A separate camera will be first inserted into bore well to judge position of the child in bore. Then according to position of child robot is inserted into bore well by keeping back support to be faced towards back of child. All other four arms are at extreme position of the robot.
After reaching the level of the child with help of back support catcher & its opposite catcher (Y-Y axis catcher) the child will be pushed into the center of robot. (If the child had fallen exactly at center of bore then there is no need to adjust catchers.)
After suitable positioning of the robot's other 2 catchers (X-X Axis) where executed to catch child into robot. As these catchers are coated with soft material it won't hurt child.
A camera mounted on the frame confirms the position of the child caught in the robot. With the help of a chain pulley the trapped child can be pulled out of the bore well.
Like this entry?
-
About the Entrant
- Name:Girish Kulkarni
- Type of entry:individual
- Software used for this entry:Peo E WF5
- Patent status:none