






The Problem:
Within the LADAR marketplace & Laser Scanner systems today, there are not any low cost, real time and high accuracy LADAR (LAser Detection And Ranging) laser scanner systems. This MKS LADAR Project is created to solve this Problem. A LADAR laser scanning system would revolutionize the way humans and electronic and computer systems would interact, by providing real world data point cloud to the virtual reality computer systems & video graphics systems.
The Advantage:
A MKS LADAR is a real time LADAR system which would map the surrounding real world environment within several millimeters of accuracy at a distance in excess of over 150 meters. This mapped environment would be able to be stitched together with other similar LADAR systems at different optical vantage points to “Create the new future” world of real time 3D Mapping, for any environment and location, person or thing.
1: Robotics Systems:
Real time positioning of robotic systems, Including moving and mounted systems as well as ground fixed multi point tracking system. Adding to this all robotic obstacle avoidance for multiple simultaneous robots in a surrounding mapped area. For example, tracking of multiple UAV’s within a single Ladar scanner system. (Localized position, obstacle avoidance)
2: Indoor & outdoor mapping:
With the expansion of Google street view, real time outdoor mapping would create an improved and increased the accuracy of the outdoor environment. Buildings and street corners would be realized in real time and accuracy to the point of actually fully immersing yourself in the virtual real world location landmark.
3: Entertainment Industry:
Imagine yourself at a local football, soccer, hockey or basket ball game. And you can see the players right up close. Now with a MKS 3D LADAR scanner system, would create this reality, so much so, that you could even watch “the game” as if you were on the field/ice. You would even be able to change your viewing perspective from any viewing vantage point you wish. You could even watch the games as if you were the BALL!!
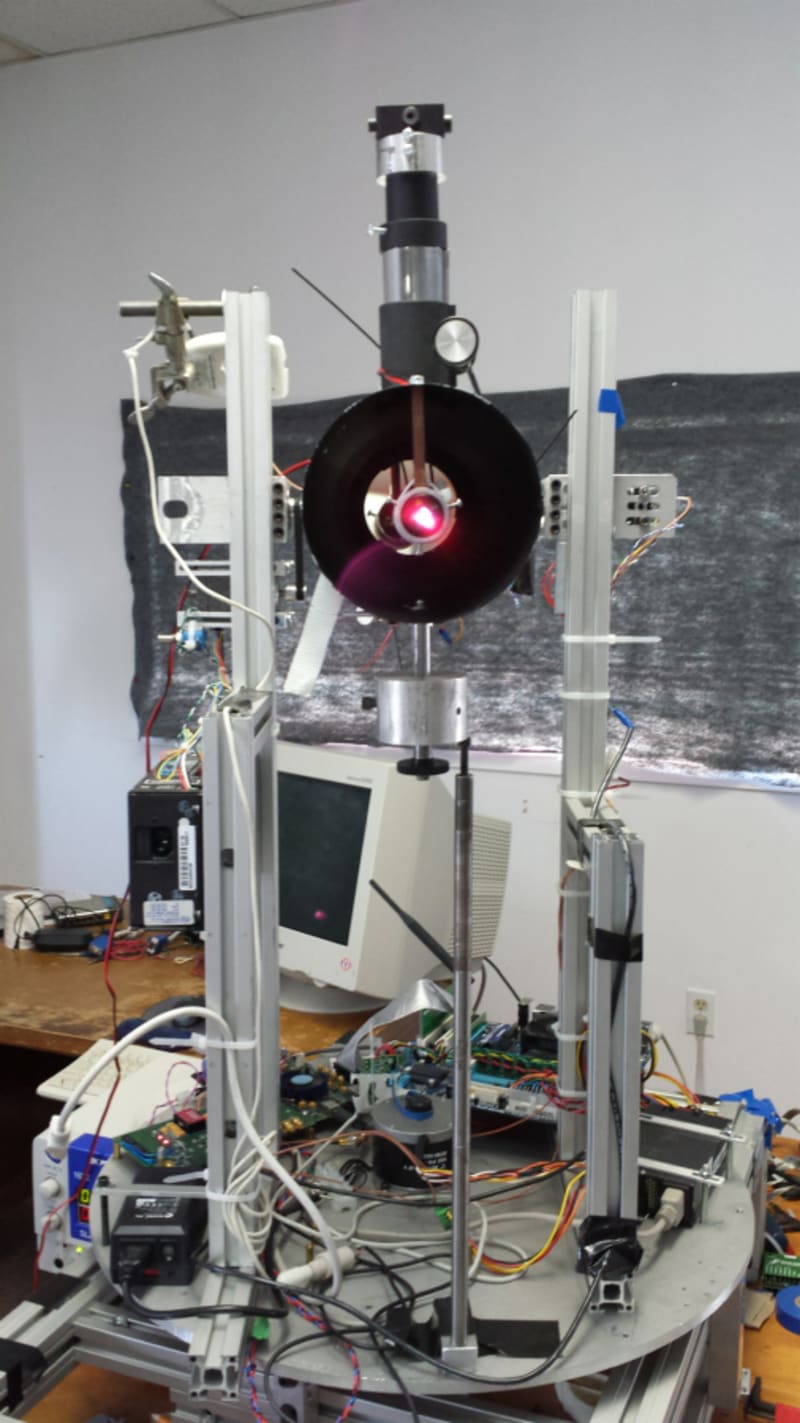
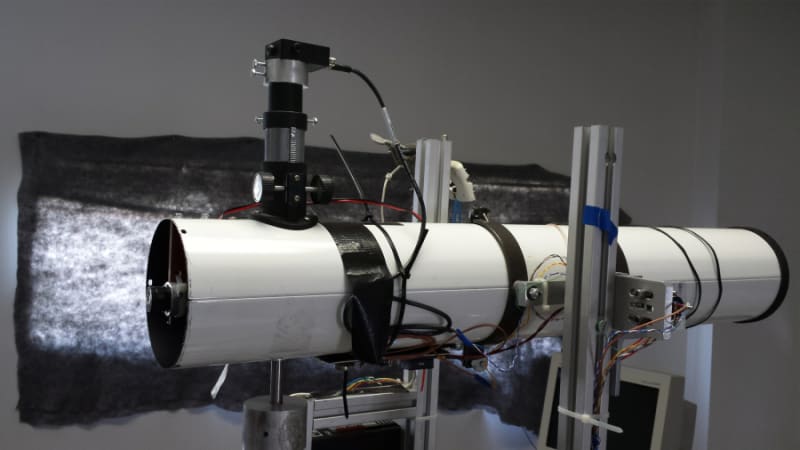
Our Technology:
This project is a system that consists of a very inexpensive telescope with a 900 mm Focal Length, 4.5 inch aperture reflecting telescope. At the focal plane, a high speed, low noise detector is attached to the eyepiece to receive the laser reflections from the surrounding environment. The Laser transmitter is mount directly in front of the secondary mirror as to keep both the transmitting optics in the same optical plane. The LADAR Telescope system is mounted in a configuration so that the complete system is moving in both the elevation and azimuth. Scanning both in 360 degrees rotation and ~ 300 degrees scanning up and down. A SoC/FPGA based Control system operates the Ladar system in the real time, by both creating the modulation and demodulation circuits. Since FGPA systems are by nature parallel systems, The FPGA controls all the scanning, motion tracking, range finding and data recording Point cloud correlation simultaneously.
Like this entry?
-
About the Entrant
- Name:Michael Kennedy
- Type of entry:individual
- Software used for this entry:FPGA Verilog, C/C++, Qt Gui programming
- Patent status:none