







In general, lower limb disabled people do their daily activities on wheelchairs. The disabled people encounter difficulties when they have to ascend or descend the stairs. For example:
• enter or exit buildings that have no ramps,
• go up or down in buildings that have no elevators or
• cross pedestrian bridges.
Therefore, this DESIGN aims to provide an alternative and enhance the quality of life for the lower limb disabled people by enabling the wheelchair to climb the stairs using a simple mechanical system with only one assistant to control the wheelchair at a reduced cost.
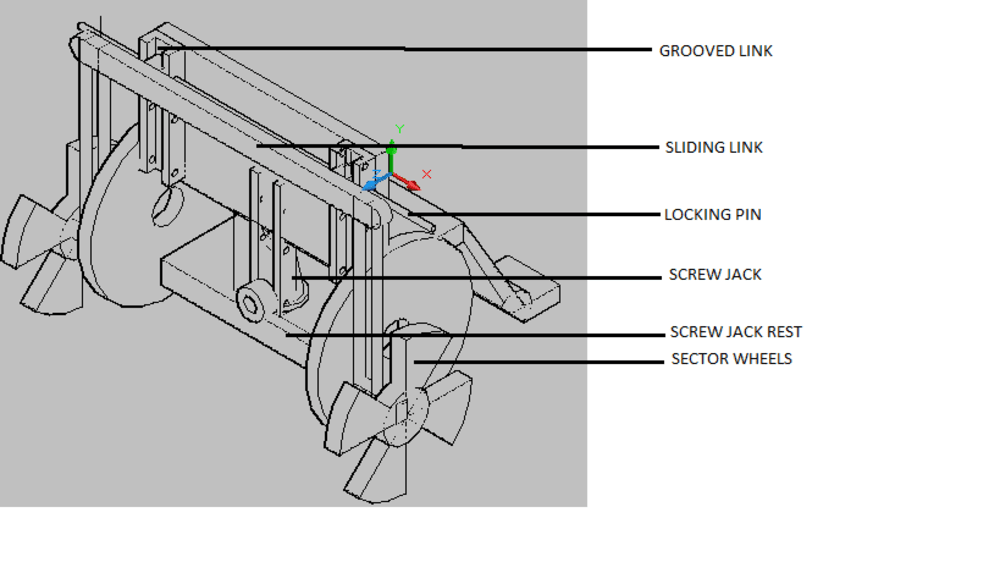
From the standard dimensions of the wheel chair and the stair case a new wheel was designed. The designed wheel had four sectors which would enable the wheelchair to climb the stair. The designed wheels were attached to a system which would slide along a grooved link.The grooved link was designed prior to this and a mechanism for locking the system at the required position was also designed. This mechanism was simulated using ADAMS for checking the feasibility.
The Mechanism is as follows:
1. When the stair is reached the screw jack is operated and the wheel chair is lifted
2. The climber system now comes down sliding along the grooved link and the spoke/sector wheels carries the entire weight
3. The sliding link for the screw jack and the grooved link for the slide has holes along the side for locking at the required position
WHEEL DESIGN
The wheel design was started taking two constraints into consideration,
1. The designed spoke wheel must climb all the steps of the stair without interfacing with the riser.
2. The diameter of the wheel should be such that it would easily be installed and accommodated with the existing system.
Finally it was decided to have a four spoke wheel with the diameter of 225 to 230mm. (based on analysis of standard dimensions)
The angle between the spokes were 45 degree. This wheel was able to climb the stair without any interfacing with the riser.
ADVANTAGES OF THE NEW SYSTEM
1. No electric motors.
2. There is no use of sensors.
3. Less maintenance.
4. Climber system consists only mechanical linkages that makes it simple.
5. Reduced cost.
6. Application- in the field of defense.
7. Low cost-innovation to rural health care
FURTHER SCOPE
1. Add a motor to operate the screw jack
2. Motorize the newly designed wheels ( this may increase the cost )
3. Four spoke wheel to be replaced by a wheel with several spokes such that the climber is suitable any kind of staircase that are not standardized.
4. Estimating the force and stresses involved in the wheels and suggest material for the wheels considering the material strength.
5. Providing rollers on the periphery of the newly designed wheels to reduce friction during climbing.
Like this entry?
-
About the Entrant
- Name:Lakshmanprasad Murugesan
- Type of entry:teamTeam members:LAKSHMANPRASAD M
ABDUL BASHETH J - Software used for this entry:PRO E , AUTOCAD , ADAMS
- Patent status:pending