







Amputation has long been a problem for humankind, but thanks to prosthetics this isn't as much of an issue now. But a solution with a glitch isn't much of a solution. Prosthetic legs available in India are known popularly as Jaipur Foot or Jaipur Leg.
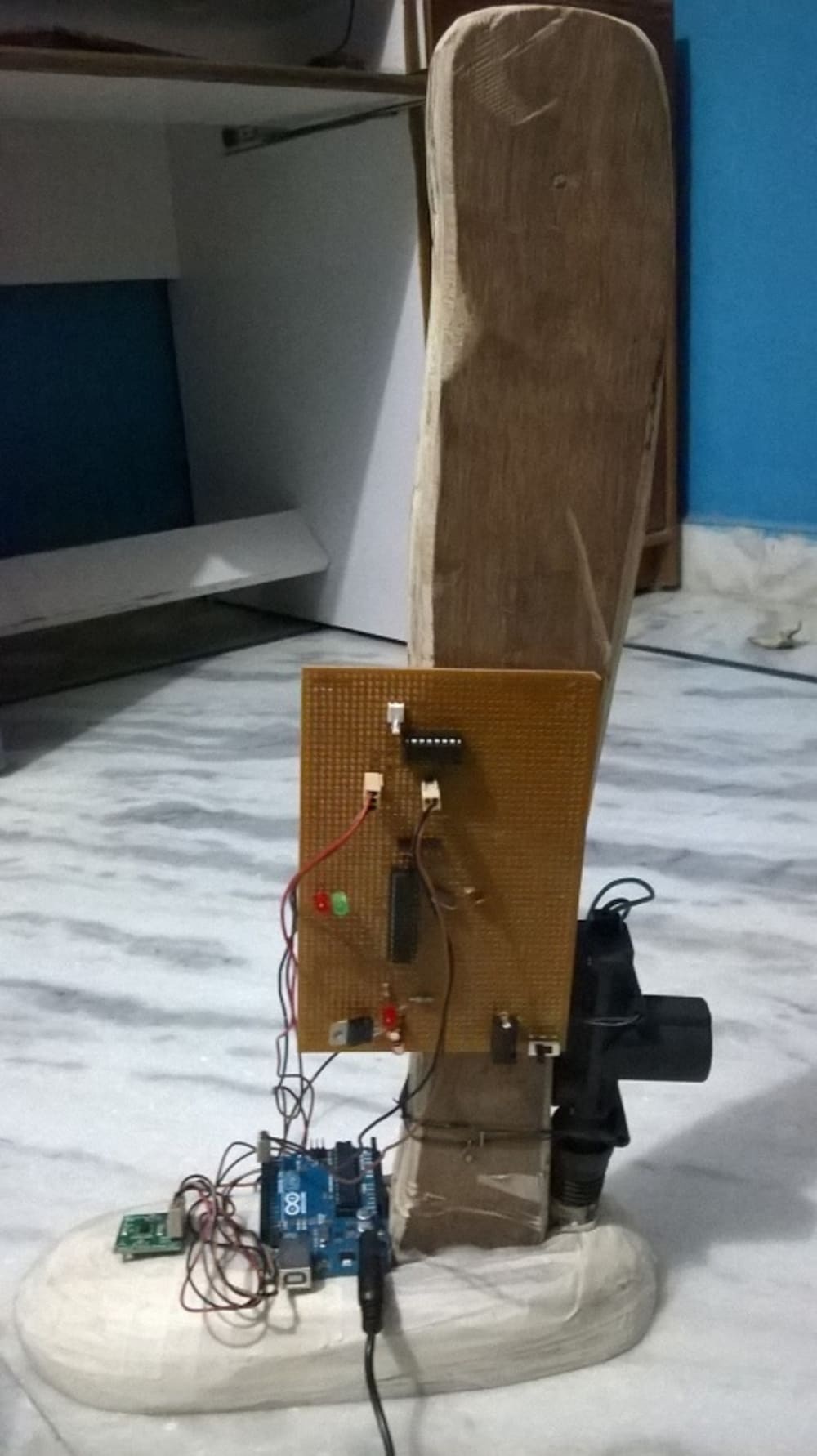
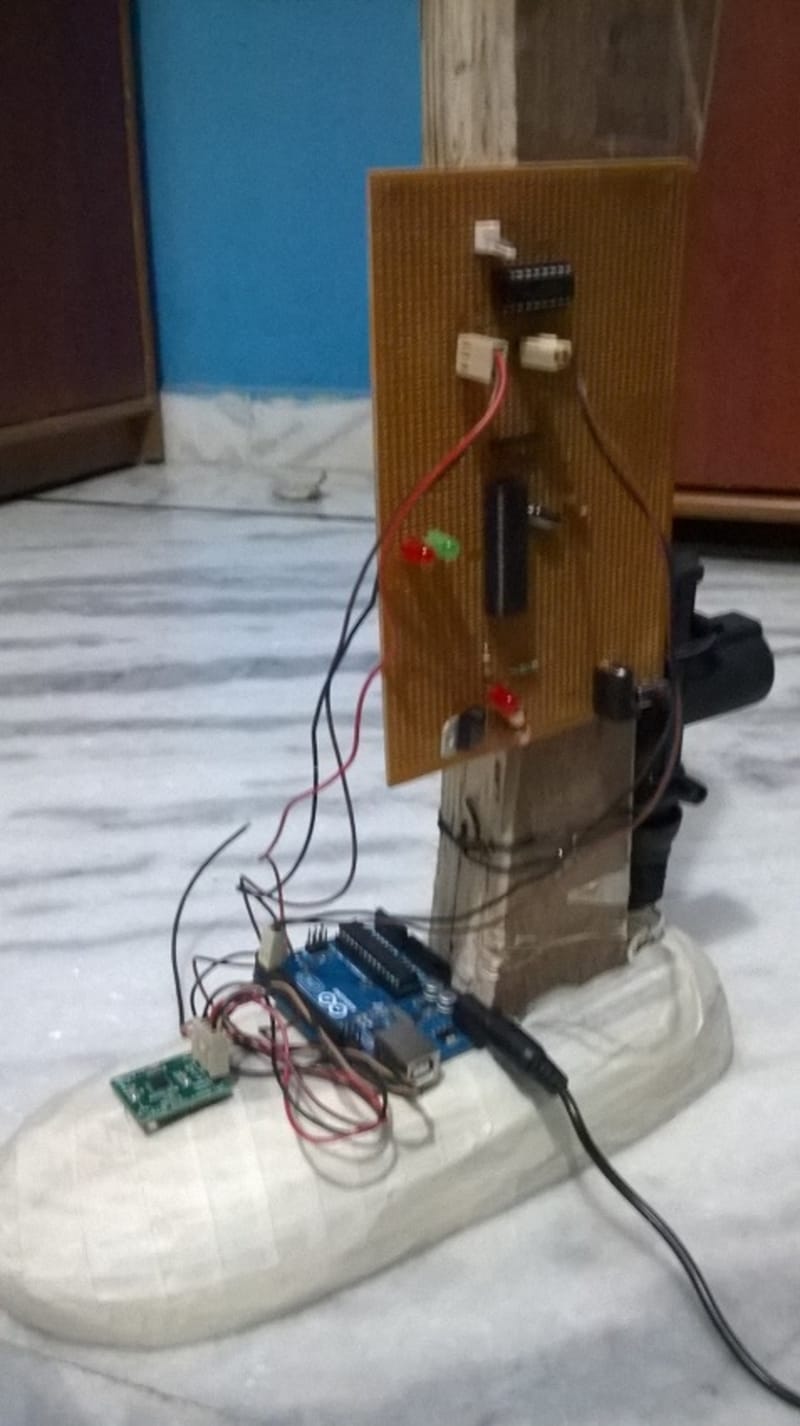
These are made with a Solid Ankle Cushioned Heel technique, which does not offer much comfort in walking. So in this regard i propose the solution of 'Automatic Ankle Adjustment for a Prosthetic Leg' where this device need not carry bulky hydraulics or heavy duty springs.
It has an accelerometer which is placed just between the inner and outer arch positions of an original leg. The 'yaw' of this sensor is sent as a feedback to an AtMega 328 microcontroller (or an Arduino) which then gives a signal to a motor after some delay. The motor is present near the inner and out ankle bone positions. Upon receiving the signal, the motor moves in a opposite direction in which the 'yaw' value is back to zero. In other words, the motor is actuated to move in the opposite direction of initial ankle's motion.
Thus in a way of making the ankle come to its rest position after a while. This makes walking much more comfortable than it was earlier. This in turn helps the amputee wearing this to avoid limping.
-
Awards
-
 2014 Top 10 Most Popular
2014 Top 10 Most Popular
Like this entry?
-
About the Entrant
- Name:Saketh Sai Narayana
- Type of entry:individual
- Software used for this entry:ARDUINO IDE
- Patent status:pending