







SPoSER (Solar Powered Surveillance and Exploration Robot) is a 6WD terrestrial robotic platform with real-world applications to either aerospace/military/defense or environmental sectors. Typical applications may be surveillance of a dangerous area by the police or army, or monitoring of hazardous environments (e.g. nuclear accident), continuously providing, next to the real-time video, loads of vital measurements (e.g. radiation level). Its main advantage over other low-cost (1000-2000 euros) commercial platforms in the market is that it can operate over an unrestricted period of time due to the solar energy, and provides also a friendly user graphical interface (GUI) for interacting with the vehicle and the onboard sensors. Besides this, it is expandable to accommodate a wide range of sensors and mechanical tools like a gripper. It is currently a small-scaled prototype that may be evolved to a larger one in meeting specific needs.
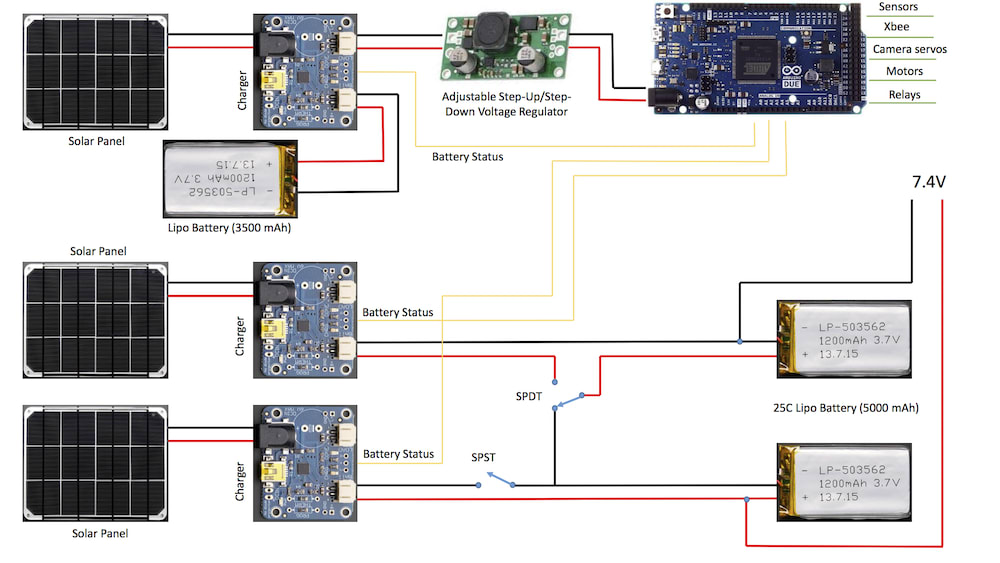
Technically, each of the six motors is mounted on independent suspension making it suitable for rough terrain navigation. The onboard microcontroller is an Arduino Due, and the communication is based on the Zigbee protocol (Xbee). Currently, SPoSER is equipped with voltage/current sensors, a GPS receiver, and a barometric/temperature/altitude sensor. It transmits real-time video via a transmitter connected to an analog camera mounted upon two servos. Regarding power, it comprises three 1A @ 6V 5.6W solar panels with each of these panels connected to a solar Lithium Ion/Polymer charger set at 1A max charge rate. The chargers comprise the input power (solar panel), the battery, and the load lines, and additionally provide “power”, “charge” and “charge done” indicators. They have the ability to provide power to the load and charge the battery simultaneously, or, in the case that power provided by the sun is not adequate in driving the load, to provide power from the battery line. The first panel (and its charger) provides power to both the microcontroller and a dedicated to that 3.7V 3500mA lipo battery. The microcontroller then provides power to the sensors and the Xbee (<100mA). Each of the other two panels charges a 3.7V 5000mA 25C lipo battery dedicated for powering the motors, moving the camera servos, and powering the video transmitter. Due to the fact that the solar panels, even connected in parallel, cannot provide the excessive amperage needed for driving the motors (> 4A), and additionally this type of charger cannot withstand such an amperage, the two batteries are charged “offline” using a set of electronic relays. So, these batteries are either connected in series to move the robot or disconnected and connected to the chargers. During testing under direct sunlight charging started at 11.15am with 2.85V per battery, at 14.15pm raised to 3.775V, and at 18.15pm up to 4.11V. So in about three hours the power was adequate for driving the motors. Regarding the GUI, it comprises motor power adjustment, movement direction, camera orientation, GPS data, map with current position, voltage/current measurements, battery status, weather data and altitude (in addition to the GPS one), and real-time video transmission.
Video
Like this entry?
-
About the Entrant
- Name:Georgios Christodoulakis
- Type of entry:individual
- Software used for this entry:Java, Arduino
- Patent status:none