Aircraft fuselage structural assembling is performed by manual drilling and rivets insertion specially in case of no accessing areas like wings on the regions where it can be founded metal sheet ribs. Consequently the sequence for assembling those parts is composed of positioning parts on jig, assembling spars, ribs etc., positioning skin, drilling, taking out skin to clean up all burrs, sealing structure, positioning skin, sealing countersink and riveting, sealing rivet backside – 9 steps;
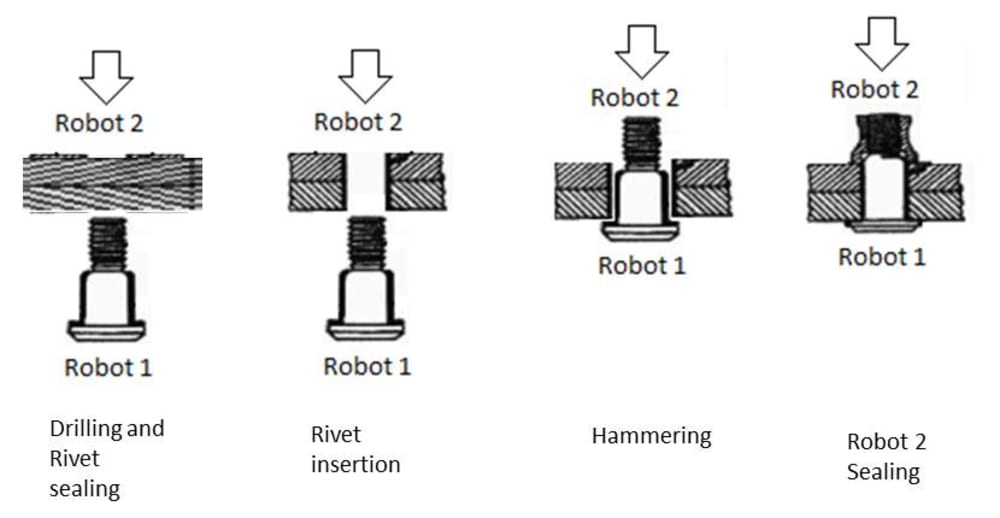
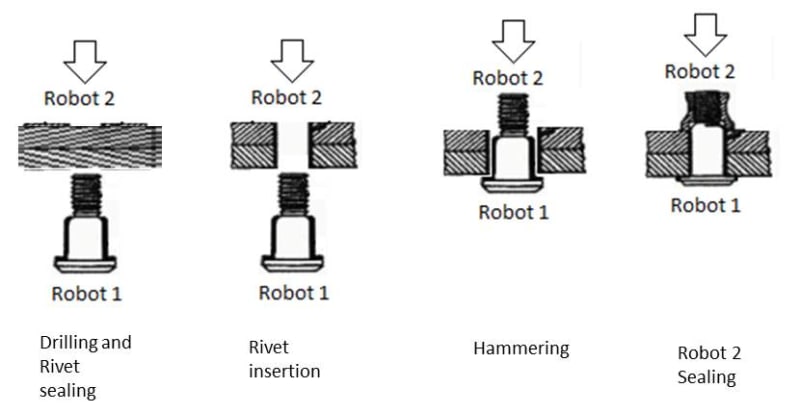
The idea is to develop two robots platforms to work in cooperation each one in one side of the jig. The first end-effector is capable to drill, sealing rivet body, positioning rivet at the hole and hammering; at the same time, the second end effector is making opposite force to guarantee no space on the junction of skin and ribs/spars (package); this opposite force and consequently no space avoids burrs going inside package which could cause friction during flight; after the first end-effector finishes its cycle by inserting rivet, the second end-effector applies body sealing on the back side of the same rivet performing the complete cycle: drilling, sealing countersink, rivet insertion, sealing back side rivet – OneStep Assembling;
The main advantage is to optimize fuselage assembling time by 55% reducing from 9 steps to 4 (Positioning parts and sealing structure – spars, ribs etc., Positioning skin, One-Step Assembly), Improving quality of Drilling and Sealing, Avoiding burrs residues inside fuselage structure, Preventing/Reducing injuries of operators due to repetitive motion and Improve Aircraft safety;
Like this entry?
-
About the Entrant
- Name:Edson Saito
- Type of entry:individual
- Patent status:none