
The Recent development in the automotive navigation system have rooted the vehicle guidance in the form of satellite navigation system which relies on the network signals transmitted and analyzed by the satellites. The system under observation sends the radio signals that are timed to the nearing radio frequency in the geo-mapping station and transmitted to the satellite for co-ordinate response, which will be displayed in the LCD via user friendly interface.
The problem regarding the GPS (global positioning station) is that the radio signals form a delay of empty voids between them which contributes to loss of original signal, The other problem is the satellite is in continuous motion which usually has 30+-5 millisecond lead with respect to the station timing, thus resulting in false interpretation of co-ordinate due massive delay over the time. The DARPA US funded defense research program are developing a prototype which uses an embedded controller that will map the route without depending on the satellites but the development is due decades of technology improvement. So the past of vehicle mapping was ELECTRO-Gyrocator which uses the gyroscope to map the prewritten film with starting point to be located first manually each every change in axis is detected by the gyroscope would change the course of the follower (follower in this case is the pointer on the film used to indicate the vehicle motion).
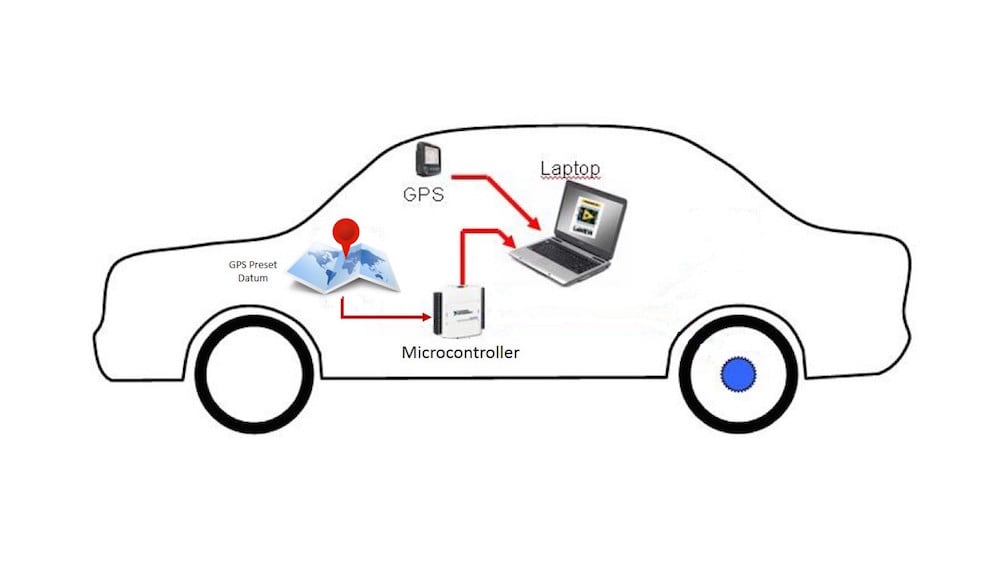
The idea of the project is to utilize the preset database of the GPS module and original GPS system with the gyroscope and accelerometer readings analyzed via microcontroller and controlling the timing through PID in the LabVIEW and combine both signals to estimate precision global vehicle positioning by multiple error and trials through random sample reading in the LABVIEW.
This idea is basically used to prevent the time delay in operations where fluctuations even in seconds may lead to undesired results like operations related to defense, space navigations, real-time tracking etc.
Like this entry?
-
About the Entrant
- Name:Mahadev Hansda
- Type of entry:teamTeam members:Mahadev Hansda
Varadendra Desai - Software used for this entry:NI LABVIEW
- Patent status:none