





At home or at work, we often need to lift and transport large and heavy objects. We can ask our friends and co-workers to help us, rent a fork-lift, or even purchase an exoskeleton. All these options are inconvenient, expensive, and result in loss in productivity. The magic handle distributed human assistive load lifting system is a compact set of devices that assists a single human to lift and manipulate large and heavy everyday objects in a direct and intuitive way.
Suppose you find a very tight parking spot. Wouldn’t it be nice to just pick up your car and drop it directly into the spot? With the magic handle distributed human assistive load lifting system, you can! Just position the three compact lifting devices (“lifters”) under the car, attach the magic handle (via suction cup) to your car, and use the handle to lift, rotate and position the car where you want it. You need only apply a fraction of the actual force and torque needed to manipulate the load, as the lifting system is designed to greatly amplify operator input. The amplification factor is adjustable to cater to how much haptic cue you like. The end result is that the user will feel that he/she is manipulating a rigid body with a smaller inertia, lighter gravity and lighter external resistances. Since the magic handle is directly attached to the car, manipulation is intuitive, and feedback is immediate and direct. This is in contrast to using a remote joystick where the human can easily feel out-of-touch with the load. Because the “lifters” are placed distributedly, very large objects can be manipulated.
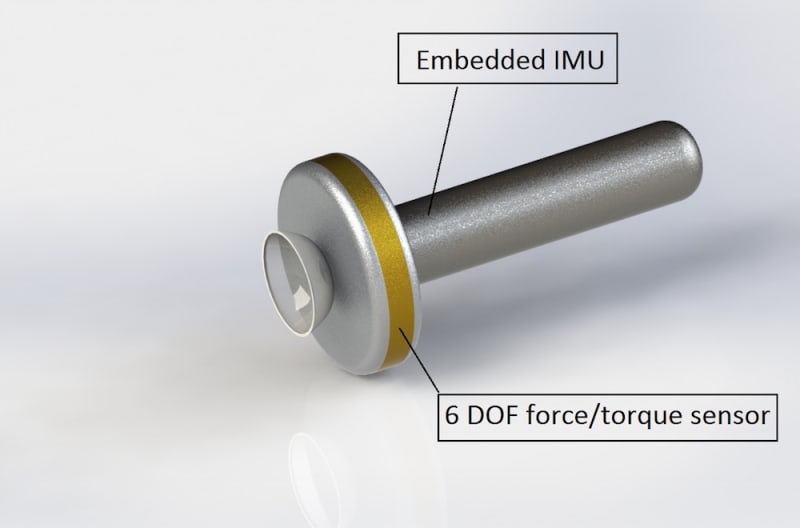
The “handle” is equipped with a six degree-of-freedom force and torque sensor and an inertial measurement unit (IMU) which together determine the magnitude and direction of the input that the user applies to the handle in a global coordinate frame. This information is transmitted wirelessly to the microcontrollers on the “lifters” to determine how much force each “lifter” should apply.
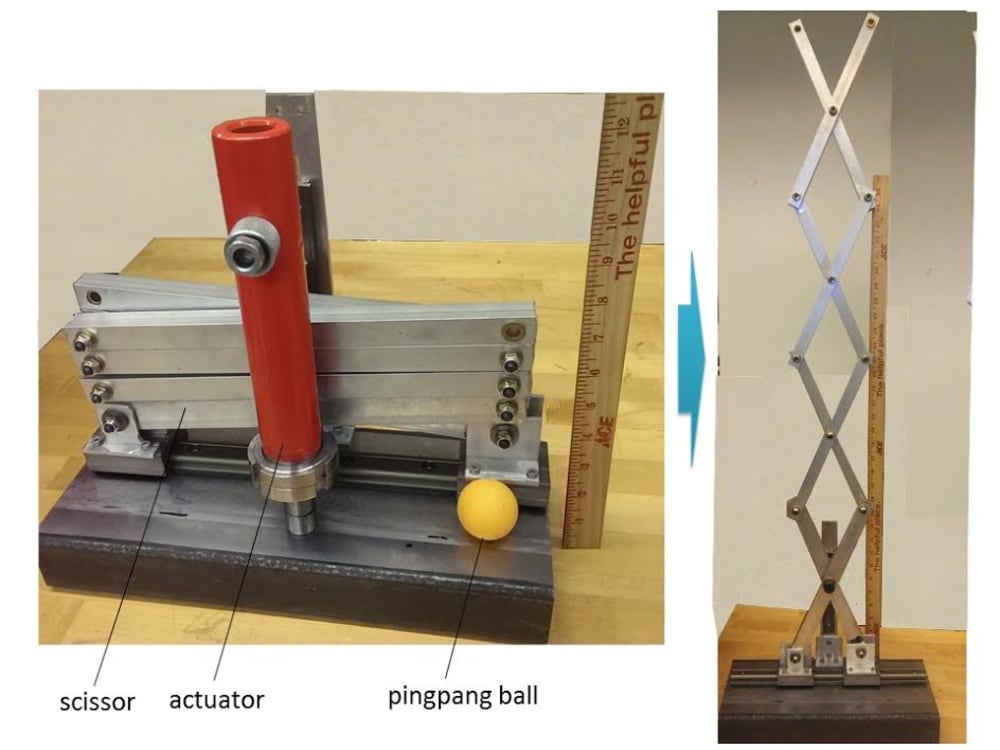
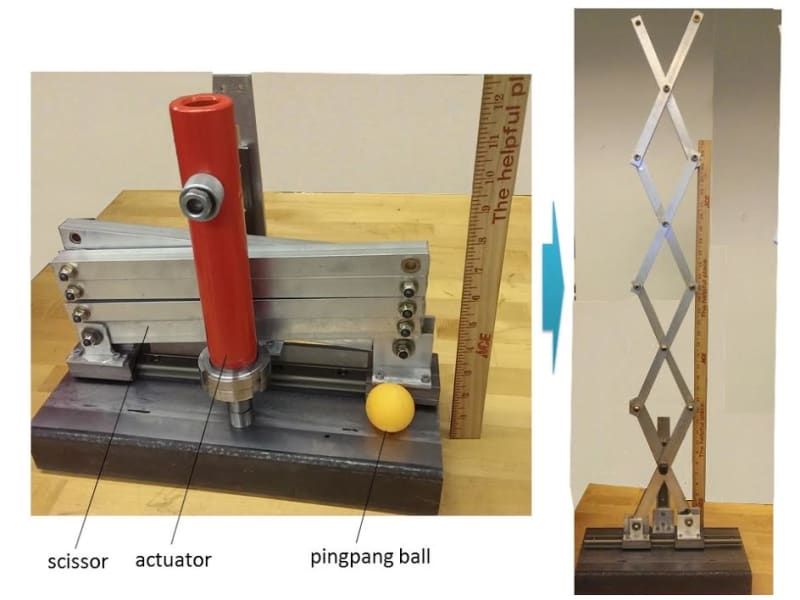
Each “lifter” is hydraulically actuated via a scissor lift mechanism. This enables the use of small hydraulic components and a small collapsed height for the device, and at the same time achieve a large final motion. Each hydraulic actuator is controlled using a D.C. motor and a micro-piston hydraulic pump/motor, also known as Electro-Hydraulic Actuation (EHA). Position and pressure sensors from each “lifter” provide feedback information for the control. The control algorithm is designed to ensure maximum safety by making the controlled system behave like a passive system as it interacts with the user and its environment.
The prototype system, under-construction, allows 3 degrees-of-freedom of assisted manipulation (elevation, pitch and roll). The system is portable, fits easily in a car trunk, and is capable of lifting a 300kg load a vertical distance of 1m in 1.5s. Translation in the horizontal plane is currently unassisted. Assistance can be added in the next generation design.
Like this entry?
-
About the Entrant
- Name:Perry Li
- Type of entry:teamTeam members:Perry Li, Hu Shi, Bryce Johnson, Xinhao Li
- Software used for this entry:AutoCAD, Matlab/Simulink
- Patent status:none