





MOTOR BIKE ENABLED VERTICAL CLIMBER (MOBEVER)
Pole climbing robots have become an interesting area for research in recent years. Several robots have been developed to solve this given problem. Every construction has its own advantages and disadvantages. The goal of this work is to design a pole climbing robot that uses a new climbing principle.
In this concept of climbing, the motorcycles drive output is used as the primary source for driving the climber. This is realized by using flexible shafts, which will be coupled with the drive output of the vehicle. Hence the existing vehicle can be used multi-purpose as a climber when the vehicle at rest by shifting an additional gear mechanism.
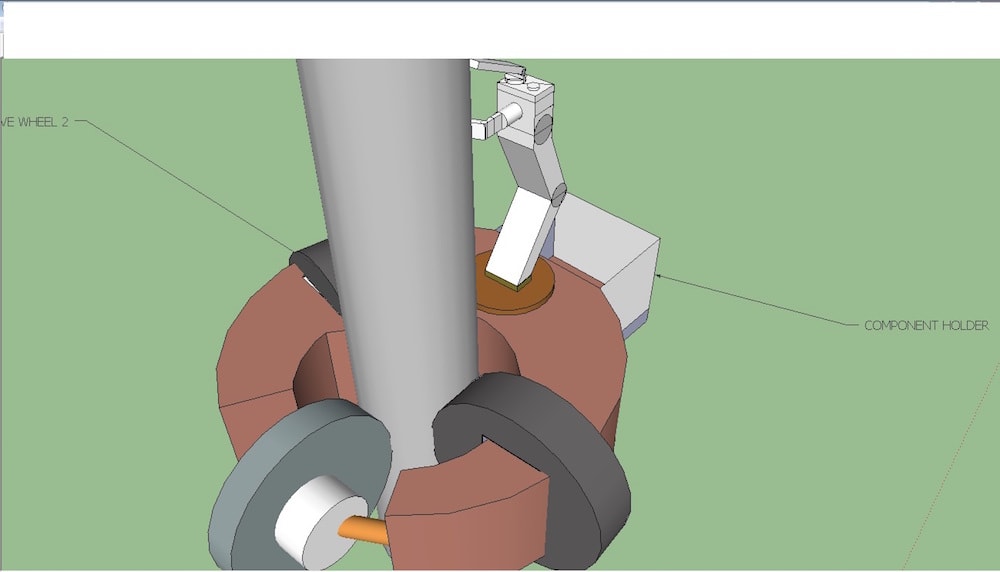
MOBEVER is provided with an adjustable guide roller, two drive rollers and mechanical brakes.
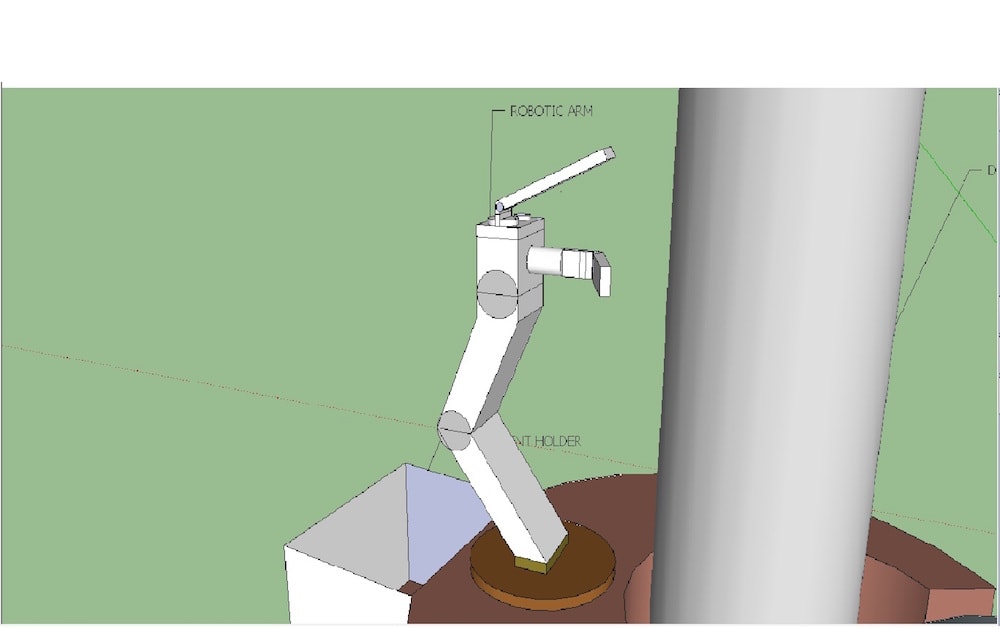
The climber also consists of three degree of freedom Robotic arm.
This pole climber‘s Robotic arm is controlled by Bluetooth connectivity made by the Arduino BTB board and Android application. The user can control the robotic arm using Mobile Phone.
MOBEVER is capable to climb a pole height up to 20 feet, with a carrying load of 5 Kgs, including of a durable weight body, processor, and a robotic arm with a component holder.
This novel approach has the following benefits:
1. Reduces risk on human life.
2. Make complicated works much easier.
3. Can Climb flexible, low weight and smaller diameter pole, in those human’s cannot do naturally.
This MOBEVER robot can be used for servicing Lamp and replacing the bulb etc..of the Electrical Lamp post. It can also find application in harvesting coconut, papaya fruits.
Like this entry?
-
About the Entrant
- Name:Jai Soorya Muthukumaran
- Type of entry:teamTeam members:H.M . Jaisoorya muthukumaran
C .J. Divya Swaroop
R. Jeetandra Ravikumar
S.A. Jai Abilash - Software used for this entry:Google SketchUP
- Patent status:pending