




HASCAMRA
In this undertaking we intend to develop an automated mobile robotic arm, for medium duty work (for a payload of 50-100 kg ).
1. Even though many robotic arms ( completely actuated through hydraulics ), they have either been built for very heavy duty works ( Diggers, forklifts ) or are stationary in nature, that is the base of the arm is fixed. Hence in our project we intend to develop the robotic arm on a mobile platform for medium duty work.
2. From application point of view we are developing the for the construction industry. For example, it is tough for a construction worker to carry out some activities at high altitudes due to various human reasons or supplying high amount of electric power for high altitude works is a tedious job. Herein we can use a Hydraulically Actuated Automated Mobile Robotic Arm ( HASCAMRA ) for medium payload construction works.
3. The mobile platform will either be tracked or 4-wheeled. We intend to use IR sensors and cameras for analyzing the surrounding environment of the robot.
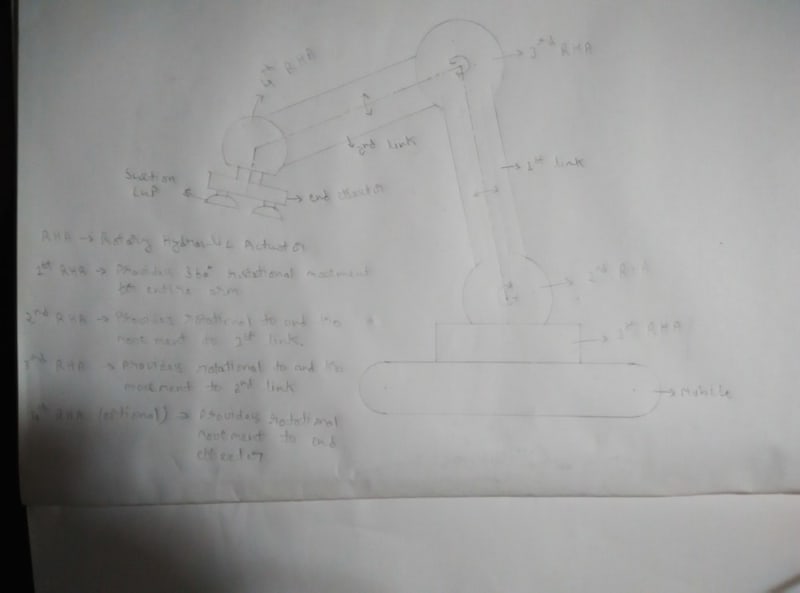
4. For now we are just developing the arm keeping a suction cup / suction cups as the end effecter. We intend to develop the end effecter area of our arm once we have achieved fruitful results in the hydraulics and mobility areas of the robotic arm.
5. The images ( rough hand sketch ), attached as visual representation, explain some of the concepts we have come up with. Based on the availability of resources and funding we will chose the best concept.
Like this entry?
-
About the Entrant
- Name:Sharan Mudda
- Type of entry:teamTeam members:Aayush Kumar, Arvind Pal, Mehul Jain, Nidhi Choudhary, Rajat Gupta, Sarthak Saxena, Sharan Mudda
- Software used for this entry:MATLAB, SOLID EDGE
- Patent status:pending