







At present the joints that help to convert motion up to or more than 3DOF are universal joint, ball and socket joint, Hooke’s joint etc. But these joints are not rigid to convert the motion and the tilted angle is also too low. To overcome this difficulty the following gear system may help. Presently the gear systems transmit their motion up to 2DOF. for example gear drive in gear boxes transmit 2DOF and gears like spur gear, helical gear, bevel gear etc., are used to transmit 1DOF only. When two shafts are joined together their motion is transmitted with the help of these joints. But in robotic arm more than 2 shafts are used. This makes the system more difficult and it tends to seek this type of joints.
The present invention relates to a pair of 3DOF bevel gears and more particularly, to a pair of bevel gears which include a plurality of gear teeth and grooves radially disposed in the surface thereof from the summit thereof, respectively, so as to be in gearing relationship from each other at a variable angle for use in various types of machines, machine tools, control machines, testing machines, medical machines, robots, toys, and the like as a driving force transmitter.
The main idea of the projection is derived from ball and socket joint. It is a joint in which the ball shaped surface of one rounded bone fits into the cup like depression. This projection is used to mesh gear at different angles and at different planes. But always the gear ratio “i” is equal to one
After all considerations, to have constant area of contact and to have circular path of movement, a bevel gear with curved teeth and grooves is designed. The design is then analyzed for manufacturing feasibility and loading feasibility.
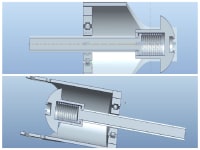
Since the AREA OF CONTACT and the line of pressure on the teeth varies accordingly, spring loaded transmission is used.
Spring is loaded below the 3DOF gear. During each transmission at various angles, the spring compressed and the power is transmitted without any slip of teeth.
To manufacture this gear VERTICAL MILLING MACHINE is used.
It works on 4 axes. But for this fabrication only 3 axes are used. There are 4 stages of operation in fabrication of this gear.
MAKING OF SPHERICAL SURFACE
MAKING OF CURVED TEETH (ROUGHING)
CREATING FILLETS (SEMI FINISHING)
SURFACE FINISHING (CONTOURING)
A further object of the present invention is to provide a pair of semi-spherical bevel gears which include teeth and grooves wherein the dimensions thereof increase gradually from the top of the gears to the base of the gears so that the intersection angle of the pair of gears is variable.
used as a gearing transmitter for various applications.
Like this entry?
-
About the Entrant
- Name:Ragav Vasudevan
- Type of entry:individual
- Software used for this entry:ProE and Solidworks, ANSYS
- Patent status:none