







The present work highlights the design and development of a prototype for automating plastering work in construction industry. The building construction is one of the most unfamiliar R&D activities in the robotics and automation community. Machines are capable of giving higher output with accuracy, precision and quality over a longer period of time than skilled manpower. They are free from fatigue and are capable of performing under risky conditions which might be hazardous for humans. Plastering work which is an integral part of any construction is one activity where the use of machines can yield better results. It is in this regard we propose our work - “Automatic wall plastering machine”.
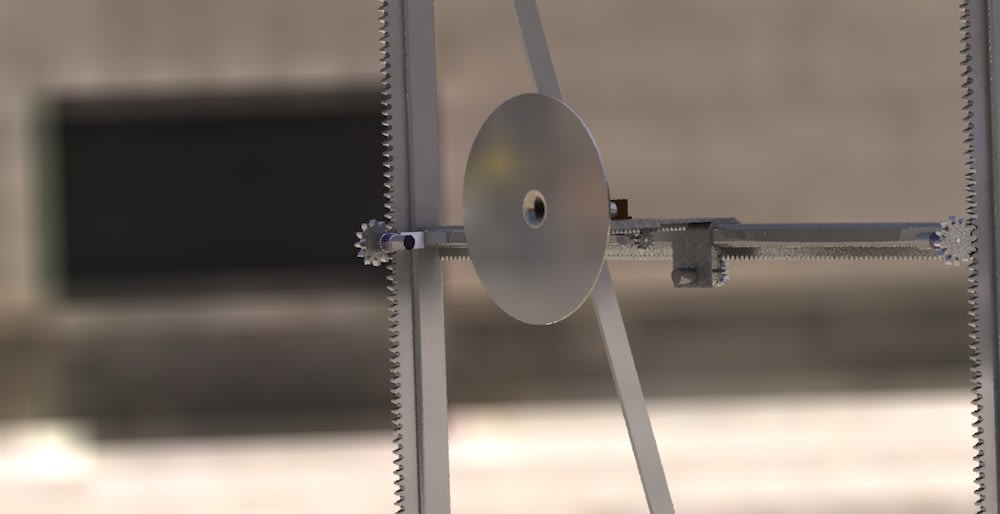
The proposed working of our prototype involves spraying the mortar using a converging passage-compressor combination and achieving the necessary finish using a smoothening plate. The complete system is automated with the help of D.C. motors, rack and pinion gears and microcontrollers. The working of the system is as follows: The mortar is delivered onto the wall through the center of the smoothening plate. The mortar flows through a passage to a converging passage.As it reaches the converging passage compressed air at a high pressure is supplied from a portable compressor. This forces the mortar to be sprayed onto the wall were it sticks due to the high pressure. The final finishing and smoothening operations are performed with the help of a rotating circular plate (smoothening plate). The flow rate of material through the spraying arrangement can be controlled by adjusting the compressor pressure and hence the thickness of mortar applied on the wall can be controlled easily. This leads to lesser wastage of material and better economy.
The prototype mentioned above can be improved upon by incorporating the following additions:
1.With some small additions like a few more sensors and extra drives the system can be extended to include ceilings as well as rounded edges.
2.The incorporation of a slurry pump to the system has the potential to widen its range of applications. The mortar can be pumped to the nozzle thereby reducing the dependence on the compressor as well as eliminating the trough that is to be mounted on the frame.
3.Further study can be carried out on the design of the smoothening plate.
4.With a few extra fittings the system can be altered to include capabilities of a spray painting robot. Thus painting can be carried out in the same way as that of spraying mortar. This flexibility of the machine will give it a sure edge over its competitors in the market.
5.The power source can also be modified to include DC as well as AC current supplies.
6.With further additions of supporting instruments and techniques flow distribution and quantity disposal of mortar on wall can be studied and correspondingly improvements be made.
Video
Like this entry?
-
About the Entrant
- Name:Bobby John
- Type of entry:teamTeam members:PRAVEEN PRABHAKAR,
BOBBY JOHN. - Software used for this entry:SolidWorks
- Patent status:none