








The evolution of the human robotic prosthesis with the capabilities to simulate the majority of the movements of any extremity creates the necessity to develop more sophisticated control techniques, mainly in the interface with the neurological system and the control of the mechanical prosthesis.
To activate a robotic prosthesis after an amputation, the most common resource is to use another muscle’s signal. When said muscle is contracted, a transducer is induced of a micro impulse that is amplified in order for the signal to be conditioned, to be used as information to activate an actuator. This system has been useful, but very limited in the number of signals, and undermines the potential of robotic prosthesis.
Nanotechnology allows creating micro interfaces connected directly to axons of the motor nerves that give the specific signal from the neurons to move a determined muscle. Although this can be a good solution, it represents a very expensive and complicated intervention that requires sophisticated techniques of microsurgery, when applicable. In addition, recovery lapse from surgery jeopardizes the quality of neuronal connections and motor nerve axons can be affected, complicating the neuronal plasticity for the future control of the prosthesis.
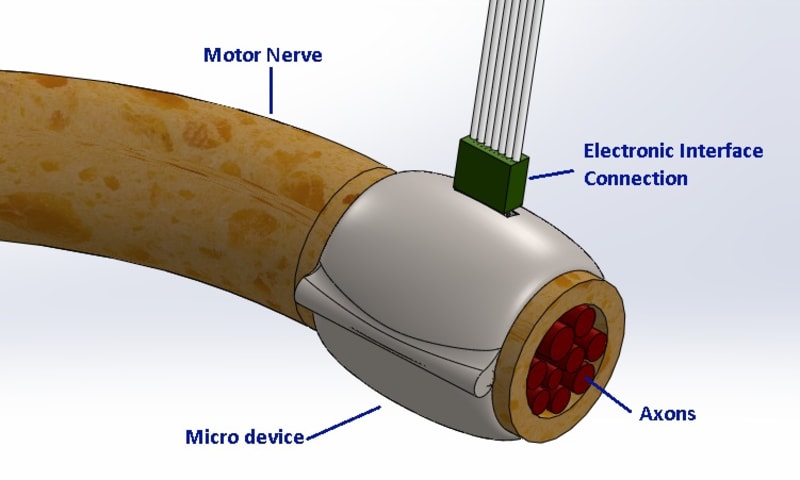
An alternative solution using both principles would be to use a Micro interface to control robotic prosthesis, using the axons of motor nerves. This system uses the induction of the potential in the axon, and the selection of specific signals generated by the motor neurons, which can give us the required signals to obtain enough information to control the prosthesis. This would result in the lack of need of microsurgery, resulting in a lower cost alternative that can be implemented at the moment the extremity is amputated, reducing the neuronal plasticity therapy.(fig. 1.0).
Through the development of this micro device as carrier of a conjunction of micro potential transducers -that can measure the induction of the voltage inside the axons from -70mv to 45mvin relation of the external face of the nerve bundles- it is possible to create a matrix of radial induction impulses, so when the motor neuron sends a signal to contract a muscle, the radial sensors will receive the inductive potential in different proportions depending of the distance from the axon to the sensor (Fig 2.0).
An advantage of the implementation of this kind of sensor is that its mounting is on the surface of the external face of the nerve, which can be done without the need of microsurgery. Once the micro device is installed, it is possible to run the characterization of the signals depending on the sent signal from the motor neuron. To move several muscles at once, it is necessary to create the patrons that represent all main possible movements (Fig 3.0).
This device has an enormous area of opportunity due to its lower cost, the simplicity of its implementation and the applicability for the most extremities, with the capability to control the most sophisticated robotic prosthesis.
Video
-
Awards
-
 2015 Top 100 Entries
2015 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Alberto Prud Homme
- Type of entry:individual
- Software used for this entry:Solid Works
- Patent status:none