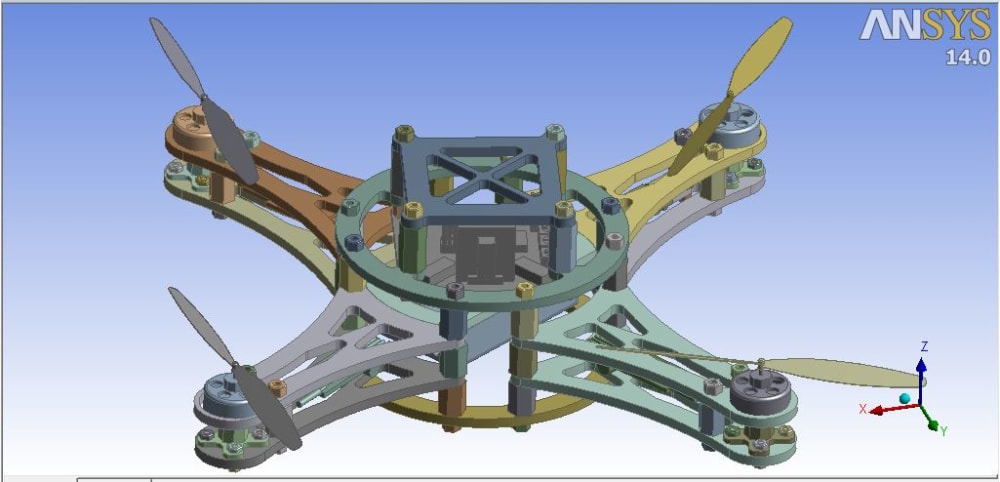





I have designed a quadcopter. I also have designed a lot of automobile components (ex: suspension gearbox, cvt, rollcage, eye joint ,ball join, knuckle,steering, etc). I have not gotten any coaching or professional help from any person. I have learned some things by youtube and lot of things myself.
A quadcopter, also called a quadrotor helicopter or quadrotor, [1] is a multirotor helicopter that is lifted and propelled by four rotors. Quadcopters are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is generated by a set of rotors (vertically oriented propellers).
Quadcopters generally use two pairs of identical fixed pitched propellers; two clockwise (CW) and two counter-clockwise (CCW). These use independent variation of the speed of each rotor to achieve control. By changing the speed of each rotor it is possible to specifically generate a desired total thrust; to locate for the centre of thrust both laterally and longitudinally; and to create a desired total torque, or turning force.
Quadcopters differ from conventional helicopters which use rotors which are able to vary the pitch of their blades dynamically as they move around the rotor hub. In the early days of flight, quadcopters (then referred to as 'quadrotors') were seen as possible solutions to some of the persistent problems in vertical flight; torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles.
In the late 2000s, advances in electronics allowed the production of cheap lightweight flight controllers, accelerometers (IMU), global positioning system and cameras. This resulted in a rapid proliferation of small, cheap consumer quadcopters along with other multi rotor designs. Quadcopter designs also became popular in unmanned aerial vehicle (UAV or drone) research. With their small size and maneuverability, these quadcopters can be flown indoors as well as outdoors.
One disadvantage is stability. Quadcopters are not more stable than regular helicopters, they are less stable. In fact, they're so unstable, they need to be fitted with electronic stabilisation because no human can realistically fly one without it. (I design such stabilisation systems and autopilots for small multirotors). The fact that quadcopters mandatorily need full electronic stabilisation, while many RC helicopters do not, leads to the misconception that quadcopters are more stable. If you were to fit an equivalently sized helicopter with the same full electronic stabilisation system, you'd quickly find that a helicopter is in fact more stable.This comes down to a lot of aerodynamics, but in effect it's to do with the fact that the formula for kinetic energy is 1/2mv^2: it takes four times more energy to move a mass of air at twice the speed; compared to only twice the amount of energy to move twice the mass of air. In both cases the same amount of (m*v).
Like this entry?
-
About the Entrant
- Name:Ankit Kumar
- Type of entry:individual
- Software used for this entry:solidwork,pro-e,ansys
- Patent status:none