



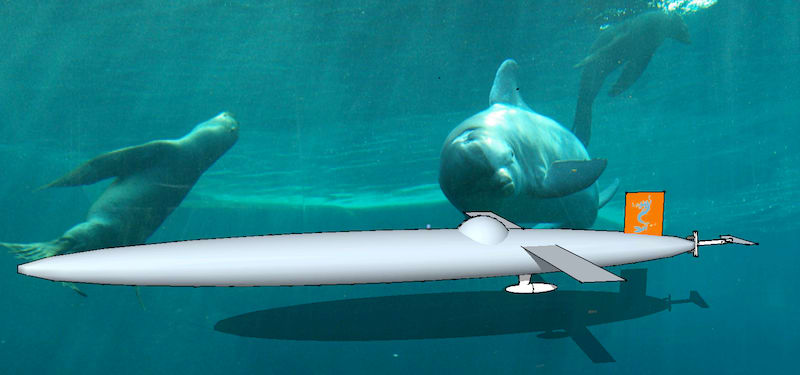


Our Sirena Autonomous Underwater Vehicles - AUV / marine robot offer the ultimate in autonomous remote subsea survey capability. These free-swimming autonomous underwater vehicles are characterized by great maneuverability and high accuracy of stabilization. Hydrodynamic shape, accurate instruments and excellent battery capacity makes these AUV's ideal choices.
Sirena is available in several configurations and depth ratings. The main depth ratings are:
3000 meter
4500 meter
6000 meter
Because our HUGIN autonomous underwater vehicles can function without tethers, cables, or remote control, they have a multitude of applications in oceanography, environmental monitoring, and underwater resource studies. A key element in the HUGIN concept is the application of a common technology that makes the systems adaptable for navy and commercial applications. Our modular design allows different payload configurations, depending on the customers needs.
Key Features
Very stable and low noise hydrodynamic platform for payload sensors
High mauvrability providing terrain following and turning radius of 15 metres
Operating depths of 3000, 4500 and 6000 metres
Operator supervised ("acoustic tether"), semiautonomous or autonomous operation
State of the art Aided Inertial Navigation System (AINS)
Provides robustness and sound technical solutions to the demands of modern navies
Latest battery technology with up to 100 hours endurance at 4 knots
Highly flexible configuration and integration of payload systems
Typical payload sensors are synthetic aperture sonar or side-scan sonar, multibeam echo sounder, sub-bottom profiler, camera, CTD and volume search sonar
to view the design document.
https://sites.google.com/site/deeoseaauv/
Examples of the available payload sensors include:
HISAS (High Resolution Iterferometric Synthetic Aperture Sonar) rated to 3000 m
EM2040 Multibeam Echosounder
Sidescan sonar
Sub-bottom profiler
Still image camera
Turbidity sensor
ADCP
Methane sensor
Video
Like this entry?
-
About the Entrant
- Name:Anush Badii
- Type of entry:individual
- Software used for this entry:sketchup
- Patent status:pending