








Nearly 7 billion hours of delay and more than 3 billion gallons of fuel were wasted in 2015 due to traffic congestion in the U.S., a significant portion of which is due to delays at traffic signals. Researchers at the University of California at Riverside, the Federal Highway Administration, and Leidos, Inc. have developed “GlidePath”, an intelligent driver assistance system that uses signal phase and timing information (SPaT) from upcoming traffic signals to determine the best driving speed profile to pass through the intersections.
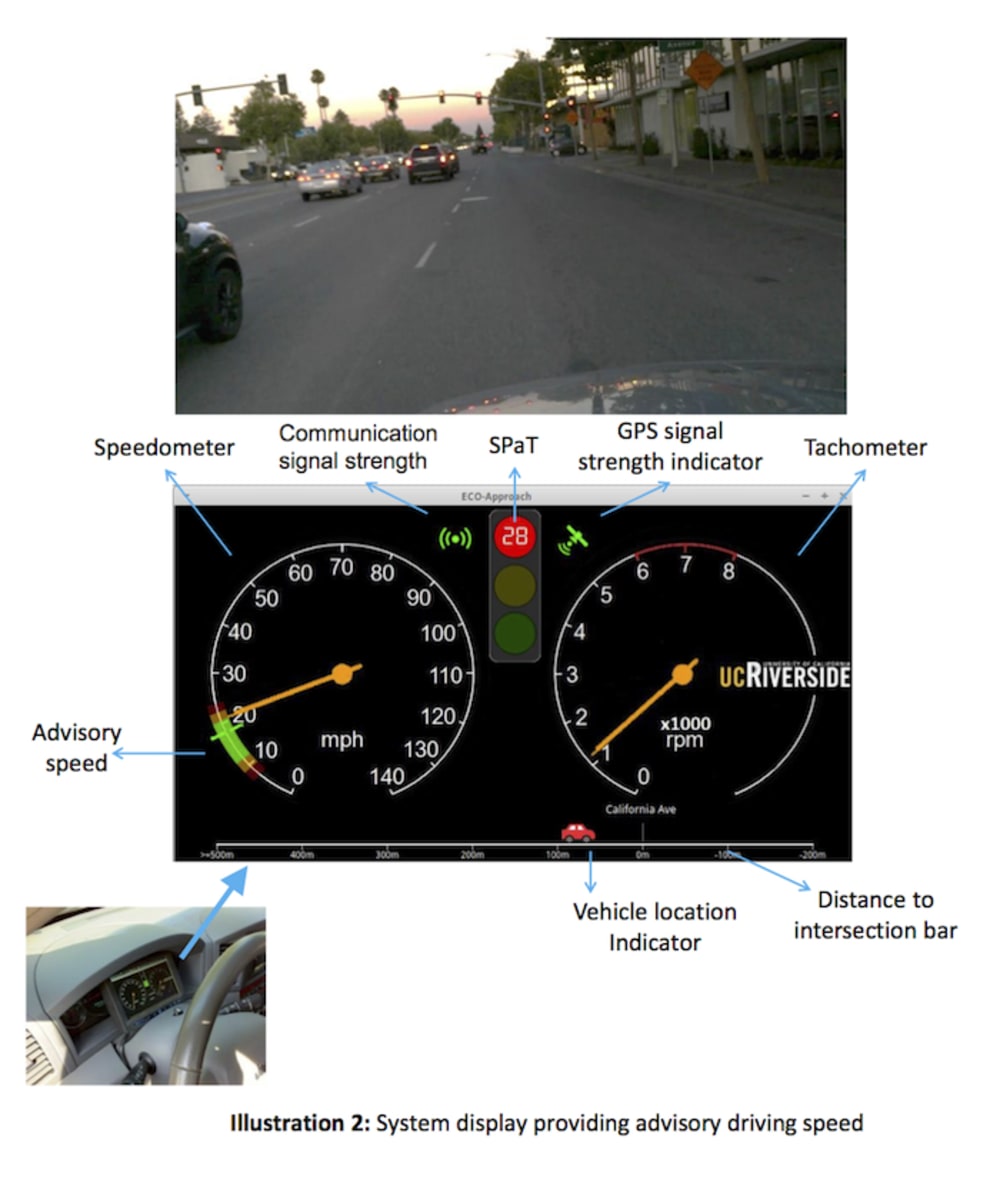
In the near future, vehicles will be able to receive real-time SPaT information from traffic signals in many U.S. cities through some form of connectivity such as localized broadcast by the traffic signals or cellular networks. The GlidePath system uses this SPaT information along with the information about the current position of the vehicle (from on-board GPS), the distance from the preceding vehicle (from on-board radar), and the relative location of the intersection (from on-board digital map) to determine the best course of action from one of the four possible scenarios shown in Illustration 1. These are: 1) slowing down in advance so that the vehicle reaches the intersection just when the signal turns green; 2) speeding up (while staying under the speed limit) to pass through the intersection before the signal turn red; 3) cruising through the green light; or 4) coasting to a stop if the red light is truly unavoidable. Once the GlidePath system has determined the best course of action, it then designs the best driving speed profile that would minimize delay and fuel consumption without compromising safety. After that, the system provides recommendation in terms of advisory driving speed to the driver through a display (see Illustration 2). An advanced version of the system that interfaces directly with the vehicle’s control modules can also enable the vehicle to follow the advisory driving speed automatically.
The GlidePath system works in any kind of traffic signal configurations and settings whether fixed-time or actuated control, uncoordinated of coordinated traffic signals, and isolated intersection of corridor with multiple intersections. It can be implemented as an embedded system in the vehicle—in the same way as adaptive cruise control—or as an aftermarket application on smart devices such as tablets and smartphones.
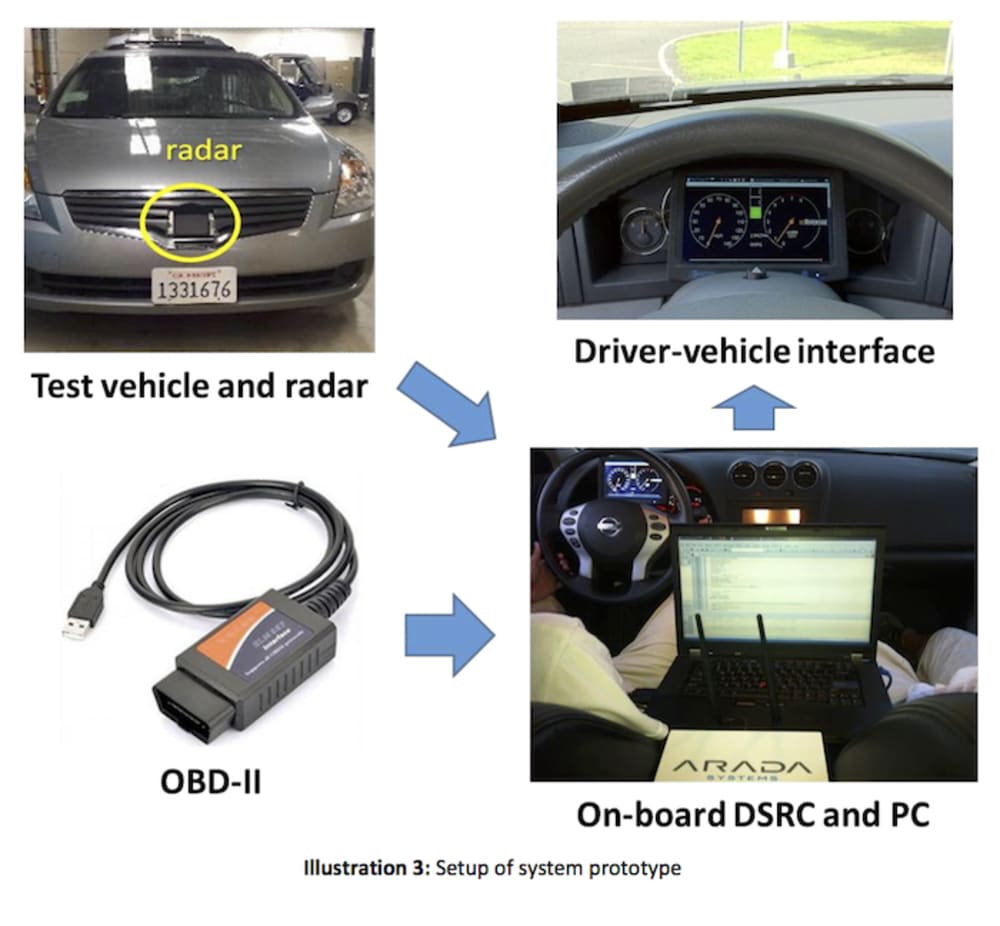
The GlidePath system prototype (see Illustration 3) has been developed and tested in a controlled environment (without other vehicles) and in real-world traffic. The results show travel time savings of 10-40% and fuel savings of 5-20% on average for the test vehicle. The system has also been evaluated in a traffic microsimulation environment under different levels of traffic congestion, technology penetration, and signal coordination. The results show that travel time and fuel saving benefits are gained not only by the vehicles equipped with the GlidePath system but also by the other vehicles, resulting in positive effects for the entire traffic. These results show the promise of the GlidePath system in improving the mobility and sustainability of future vehicles as well as roadway transportation systems.
Video
-
Awards
-
 2016 Automotive/Transportation Honorable Mention
2016 Automotive/Transportation Honorable Mention -
 2016 Top 100 Entries
2016 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Kanok Boriboonsomsin
- Type of entry:teamTeam members:Matthew Barth, Guoyuan Wu, Kanok Boriboonsomsin, Peng Hao, Xuewei Qi, Osman Altan, John Stark
- Software used for this entry:Paramics, C/C++, Python/PyQt, Java
- Patent status:none