






For several years, research and technology development has been under way to capture electroencephalographic (EEG) signals, process and interpret them to implement a brain-computer interface, or BCI (Brain - Computer Interface). In the first years when these works were developed, they were first designed to provide an interaction channel for handicapped people who for various reasons totally lost motor skills. This type of work can be found for example in [1] where the author develops a method for interpreting EEG signals and move a cursor on a computer screen. In research [2], [3] and [4] the recent developments related to the development of BCI, the pre-processing, processing, feature extraction methods, classification and interpretation procedures are presented.
Over the past few years, the BCI were not only applied to people with motor disabilities; but also were aimed at people with intact motor abilities for different applications. These applications could be games, applications in robotics and aerospace missions among others [3] and [6].
Recently, research works related to BCI are moving towards applications in communication with people in a vegetative state, or people who are in a coma. These studies could be found in recent work [7], [8] and [9] where the authors show the first advances in this type of application.
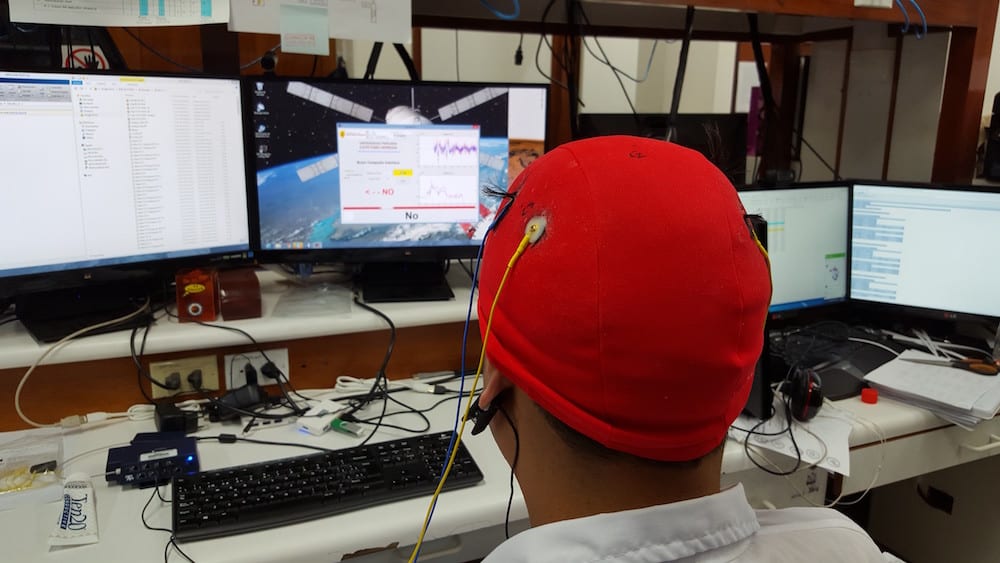
Currently, there are several procedures and methods for implementing the BCIs, as described in works [3], [5], [10] and [11]. The first stage is a process for understanding the EEG signals, which is a record of the electrical potentials generated by the brain and obtained by electrodes placed on the scalp surface with the help of conductive pastes and gels. The EEG signals have different rhythms in the frequency domain ([1] [12]) with the following characteristics:
Rhythm Alfa or Mu: Low voltage (20-60 microvolts / 3-4mm) with variable morphology. High frequency (8-13 Hz).
Rhythm Beta: Low voltage (10-15 microvolts / 1-1.5 mm) with variable morphology. High frequency (13-25 Hz or +).
Theta rhythm: High Voltage (50 microvolts / 7mm). Frequency (4-8 Hz).
Delta Rhythm: High Voltage (70 -100 microvolts / 9 -14 mm) with variable morphology. Low frequency (4 or - Hz).
For the exact location of the electrodes on the scalp, one can use the International Positioning System 10/20 which indicates the different positions to place the sensors, depending on the area and the activity to register. Figure 1 shows these locations.
Video
Like this entry?
-
About the Entrant
- Name:Avid Roman-gonzalez
- Type of entry:individual
- Software used for this entry:MATLAB
- Patent status:none