






Robots are rapidly coming into the picture by working in space, mines, hospitals, military, search and rescue operations etc. All terrain mobile robots is a new project and for this, many mechanisms can be developed, existing ones can be optimized to reduce cost and enhance performance.
A very important part, that is, base of mobile robots which moves the robot has been developed. It can be useful in agricultural industry, search and rescue missions during disasters and segregating garbage in landfill sites.
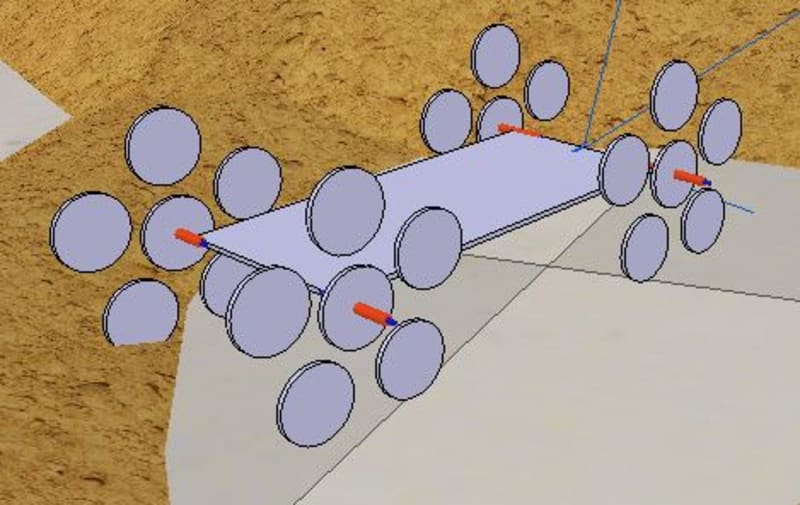
The vehicle has 5 wheels arranged as on vertex of pentagon. Five wheels are can easily be toppled in order to rotate. Revolution of wheels about axis of pentagon is controlled by parent motor.
Parent motor:
It is driving steering knuckle joint.
Child motor:
It is driving small wheel.
Copper slots:
Revolving motors are controlled from signals received from static copper slots through brush.
Say stepper mottors are used, each motor requires 4 ports, so 5 motors in a wheels requires 5x4=20 ports. Therefore 20 copper slots are made. The copper slots are attached to main frame which has the micro-controller and they are static.
Small wheel:
Diameter = 14cm
Spokes are having L shape cross section, which increases strength.
Double wishbone:
Wishbone are connected to steering knuckle as revolute joints instead of typical ball joints because of differential steering, by controlling angular velocity of parent motor, instead of Ackermann steering. Also, in this case design is simplified.
Wires:
Wires are coming from static copper slots to main frame.
Steering knuckle joint: It is similar joint to one in cars.
Suspension: It is similar to MacPherson strut.
Video
Like this entry?
-
About the Entrant
- Name:Mridul Gandhi
- Type of entry:individual
- Software used for this entry:Autodesk Inventor 2015 Pro (student), Coppelia Robotics V-REP pro edu V3.3.1
- Patent status:none