
On agricultural farms, the harvesting of fruits like mango is still conventionally done by ‘handpicking’ methods from individual trees. It is obvious that nowadays decreasing labor populations due to a variety of reasons has led to the increase in labor costs, high input energy consumption and other problems. In order to solve this challenging task, a long term and high-tech alternative is required to boost the efficiency and profitability of the farmers. Hence an automated system that is low cost and easy to use is to be provided. For this purpose an Agribot has been made an alternative automated solution.
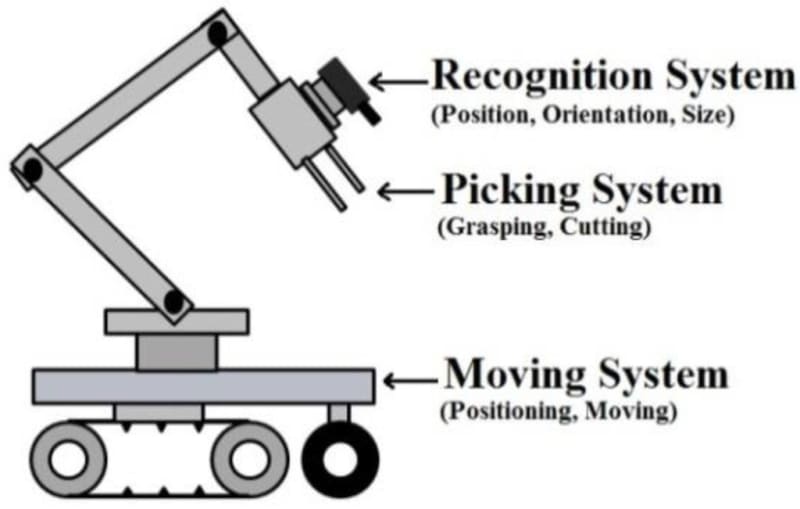
The Agribot, an automated harvester, illustrates a new emerging solution in the way of harvesting mangoes to the most pressing problem, the shortfall of laborers. The Agribot uses three systems: a moving system, a recognition system and finally a picking system. The moving system is normally used to make the Agribot move around the farm to pick the mangoes. The Agribot is programmed using the Arduino processor so that the programming and interfacing with other units could be easier. The robot will operate using a combination of joints that are used to connect various links which would be helpful in the recognition and picking operations. In the recognition system, we use a color CCD camera to capture images. The captured images are sent to the computer where it is processed by specific image processing algorithm using Matlab. Matlab software is interfaced with the Arduino microprocessor to enable the picking system. The image processing unit processes the images on specific features attributes and color specifications. This unit discriminates the mangoes separately and provides three-dimensional location and orientation of the fruit. This information helps the picking unit to target the location to be plucked. The information required to detect and pluck the fruits include color, shape, size, edges, etc. Here the picking system uses the end effector as a robotic gripper to have better and steady grasping capability. This system uses a pick and place mechanism to take out the fruit from the plant and place it. Agribot even has some drawbacks as all has. To mention a few, it needs maintenance and repair. It can be used only for mango plants and cannot be applied to tall trees. Its initial cost is a little high.
Harnessing high powered computing, use of color detection mechanism and robotic gripper arms makes the machine gently pluck the mangoes from the deep-green leaves, while mostly ignoring unripe mangoes. The tasks of harvesting mangoes have required trained discernment and backbreaking efforts of a large number of laborers. But this Agribot has made it possible to shrink the number of fruit pickers and instead use robots to handle this job. To wrap up, the Agribot is capable of escalating the efficiency and productivity of agricultural farms reducing the utilization of low-paid laborers.
Like this entry?
-
About the Entrant
- Name:Keerthana Radhakrishnan
- Type of entry:teamTeam members:JAYASRI MEENACHI
- Software used for this entry:ANSYS
- Patent status:none