







The project has its bases in two existing technologies. The first one is a multirotor drone and the second is an articulated robot. Their combination results in a DROBOT. The main purpose of this project is to combine both flexibility characteristics to ensure feasibility of some tasks.
The environment defined to develop this product is the building process of steel structures. In this scenario, a group of DROBOTS is assigned to monitor the process and to perfume some tasks, like welding. Therefore, the context of this project is the development of this special DROBOT, specialized at welding tasks.
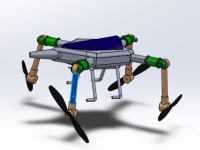
The basic concept of a DROBOT is that it features articulated joints at the middle of its mains arms. This characteristic improve its maneuverability, enabling them to perform some special tasks and to achieve some space optimization by adjusting the arms and propeller configuration.
In addition, the DROBOT is a hybrid vehicle, able to operate as a boat by adjusting its articulated arms into water (fig. render5) or like those used at swamps.
A step motor connected through a rotating screw transmission moves the arms. This type was developed to ensure that the step motor are not overload by the torque resulted from the propeller moment.
Brushless motors connected by a pulley transmission power all the propellers. This configuration was achieved to ensure that the articulated movement of the arm is uncoupled from the thrust movement.
Like this entry?
-
About the Entrant
- Name:Pedro Henrique Sousa
- Type of entry:individual
- Software used for this entry:Solidwords
- Patent status:none