



Over 20 million people are suffering from serious gastrointestinal (GI) diseases such as colorectal cancer, Crohn’s diseases and tumor, and a large portion of them require regular monitoring. GI is one of the most common diseases affecting the population worldwide. In the US, 17 million endoscopies were performed in 2002. Traditional endoscopy has three major limitations: anesthesia, complication and pain. Thus, there is a large demand within the population for a diagnosis method with less pain, reduced complication and convenience. Capsule endoscopy can answer these demands. Its estimated global market size was $178.8 million in 2014.
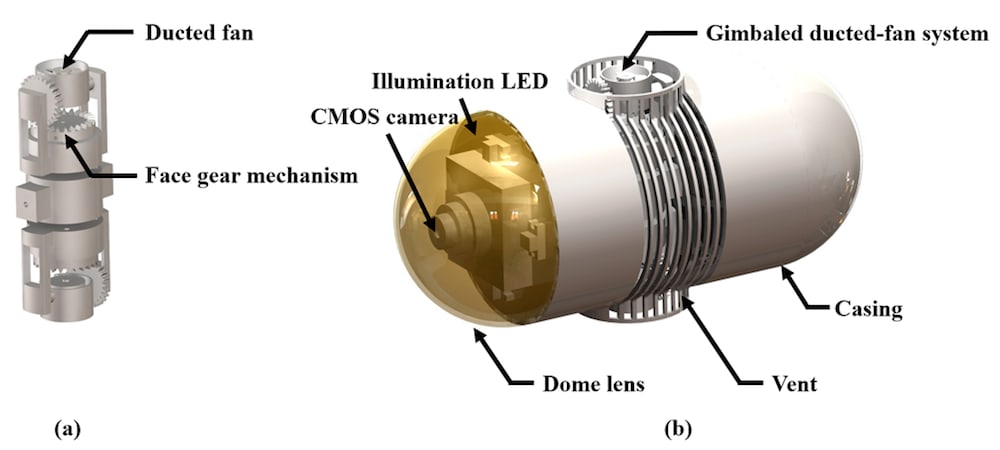
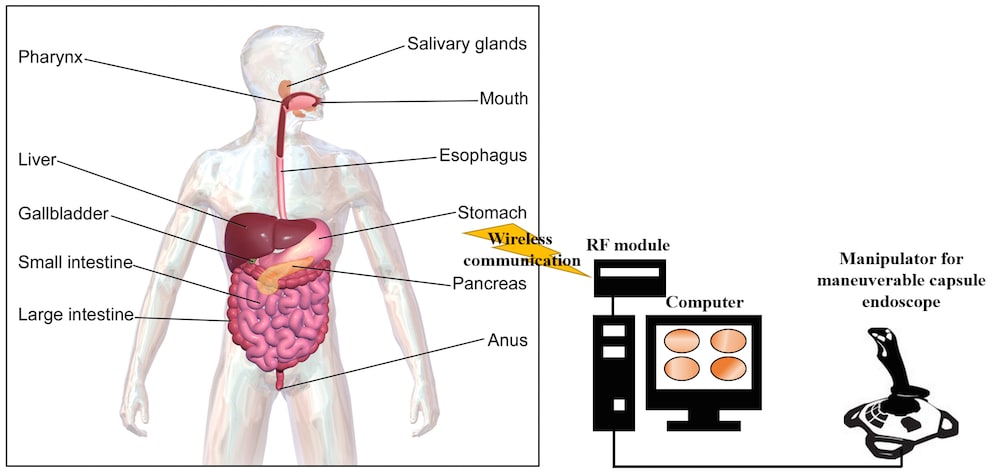
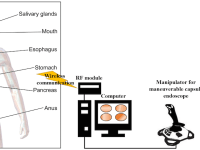
Development of a wireless capsule endoscope is a growing research area because it could be easily swallowed by patients to capture images of the digestive system without pain. However, a drawback of the current capsule endoscope is mainly passive-motion-type-endoscope resulting in limited maneuverability over observatory direction and movement. This means making detailed observation and revisiting the previous site are difficult. To overcome this drawback, a maneuverable capsule endoscope (MCE) based on a gimbaled ducted-fan (GDF) system is proposed by presenting a system design, a prototype development of the GDF system, and associated modeling & simulation.
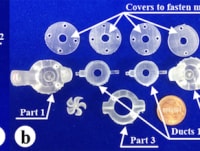
The concept of the GDF is adopted from the thrust-vector control algorithm of a space shuttle. To prevent organ damage, the ducted fan, which generates and controls the thrust required for achieving maneuverability, is mounted on a gimbal structure. A scaled-up prototype of the novel GDF system is manufactured using a commercially available three-dimensional (3D) printer. The overall conceptual design of the MCE based on the GDF system is presented followed by details of other parts needed in developing the MCE. Flow simulation and 3D path-following simulation are performed to evaluate the proposed MCE’s applicability. As a result, the mean terminal velocity of the 6:1 scaled-up MCE prototype was calculated by flow simulation and found to be 0.6047, 0.5941, and 0.9204 m/s for the three postures of the GDF system, which represented the three translational degrees of freedom. For the 1:1 scale prototype, the mean terminal velocity was calculated to be 0.1147, 0.1127, and 0.1746 m/s for the above three postures. The proposed MCE dynamic model follows the desired path profile when the Lyapunov stability–based path-following algorithm was applied to it.
In summary, the terminal velocity achieved is sufficient enough to maneuver inside the stomach organ. This will result in more robust and safer diagnosis method since it can be maneuvered freely and take wanted images of the gastrointestinal space. The proposed system’s applicability is demonstrated by flow simulation and 3D path-following simulation. Therefore, this novel MCE concept could be used for detecting and diagnosing abnormalities in the digestive system with improved efficacy and patient convenience.
Video
Like this entry?
-
About the Entrant
- Name:Sungwan Kim
- Type of entry:teamTeam members:Sungwan Kim Department of Biomedical Engineering, Seoul National University College of Medicine, Seoul 110-799, Korea Institute of Medical and Biological Engineering, Seoul National University, Seoul, 151-742, Korea Youdan Kim Department of Mechanical & Aerospace Engineering, Seoul National University College of Engineering, Seoul 151-742, Korea Institute of Advanced Aerospace Technology, Department of Mechanical and Aerospace Engineering, Seoul National University, Seoul 151-742, Korea Chiwon Lee Interdisciplinary Program for Bioengineering, Graduate School, Seoul National University, Seoul 110-744, Korea Myungjoon Kim Interdisciplinary Program for Bioengineering, Graduate School, Seoul National University, Seoul 110-744, Korea
- Software used for this entry:LabVIEW, Matlab, Solidworks
- Patent status:patented