



Buses can transport dozens of passengers. Compared to using cars for moving the same number of people, buses are more energy-efficient and environment-friendly, and make better use of road capacity. However, a longer time is usually needed for passengers to reach their destinations.
Recently, the Bus Rapid Transit (BRT) concept was developed to address this drawback, mainly by using dedicated lanes and a limited number of stops and traffic signal prioritization, along with some schedule flexibility to meet demand. BRT is now found world-wide in often-congested cities, including Chicago and Los Angeles, as one option for improving transit service. However, BRT is frequently criticized as being costly because of the dedicated lanes; e.g., the BRT proposed by Cobb County, GA, will cost about $24 million per mile of service, although that’s still less than rail transit’s corresponding cost. Moreover, to meet greater demand, dispatching buses more frequently increases operating costs.
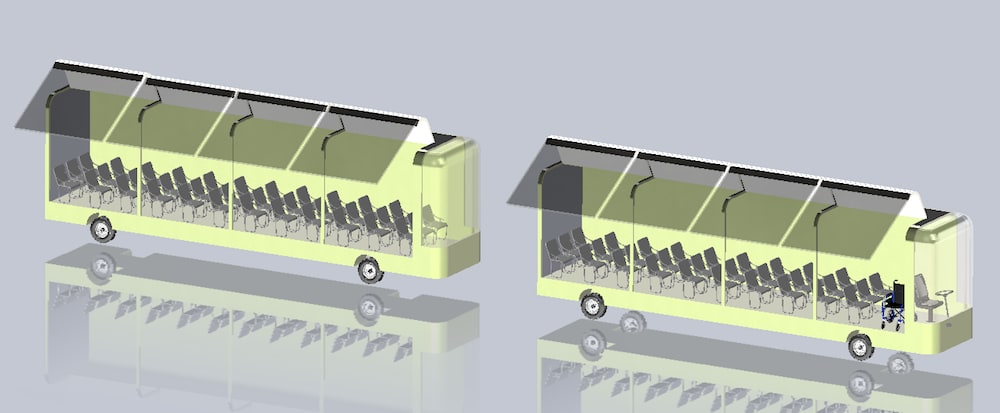
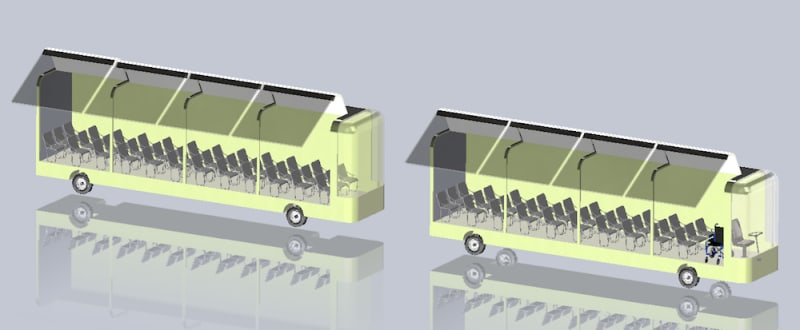
To improve BRT, we propose the Slim Semi-autonomous Bus Rapid Transit (SSaBRTransit) concept. One key difference is that the SSaBRTransit vehicle consists of separate self-propelled modules, and is slimmer/narrower (by about 25%) and longer (in overall length) than BRT buses for the same passenger capacity. Construction and maintenance of narrower dedicated lanes in cities would result in substantial cost savings; e.g., the BRT proposed by Cobb County, GA, could save about 5%. The vehicle operates semi-autonomously, since it consists of a lead module (LM) with a human driver, and at least one driverless follower module (FM) trailing behind. Hence, a second distinction of the SSaBRTransit vehicle is that its modules can be easily non-physically coupled or decoupled to meet variations in passenger demand, which would reduce operating costs (fossil fuel or electricity, and manpower), and emissions (if powered by fossil fuel). Note that a key responsibility of the human driver is to assist disabled individuals, to comply with the Americans with Disabilities Act.
The proposed SSaBRTransit vehicle’s operation starts with a human driving and positioning the LM ahead of one FM. That FM is subsequently activated by a secure wireless communications link, and will then begin tracking the LM’s movements (maintaining proper separation and alignment) via various electronic sensors that provide data to the FM’s propulsion controller; this controller also obtains the LM’s steering, speed and braking data over the communications link. As the vehicle operates its route, the communications link will also facilitate, e.g. audio and/or video in the FM(s) of communications from the driver; audio and/or video from the FM(s) to the driver; commands from the LM to open or close the FM(s)’ doors. If/when an FM should be decoupled from the preceding module, the driver will position the vehicle in a desired location and then initiate that action via the communications link. The selected FM(s) will then terminate automatic tracking operation and deactivate itself.
To summarize, SSaBRTransit will reduce implementation and operating costs compared to BRT while providing similar or better service, thus presenting a more attractive transit option and leading to reduced use of cars.
Video
Like this entry?
-
About the Entrant
- Name:Bill Diong
- Type of entry:individual
- Software used for this entry:SolidWorks
- Patent status:pending