



Commercial Vehicles such as trucks and trailers usually get stuck up in muddy trenches or in snow with one of wheels in the trench and the other on level ground. With an open differential, driver’s effort to pull the vehicle out normally ends up with one wheel, which is rotating still going deeper into the trench. Other differential types such as limited slip, locked, viscous coupling and Torsen differential have been used to overcome this difficulty but with limited success.
Differential is a device, which allows the individual wheels to be driven at different speeds while transmitting torque to them at the same time. Suppose a car is taking left 900 turn. Then for an average diameter of 0.6 m of tyre and inside wheel turning radius of 4.3 m, there will be a difference of 9 revolutions between the left and right wheel. For no skidding of right tyre, right side tyre must rotate faster than left tyre by 9 revolutions. This is easily done by using open type differential. But the things are different when one wheel, which is inside the mud rotating freely at high speed and the other wheel on level ground being stationary. For this other differential types used to only limit or reduce wheel slippage but do not eliminate it. The degree of reduced wheel slippage is determined by the amount of friction applied to the side gears. Most of these differentials are designed to transmit only limited amount of torque and may not be working well in other conditions.
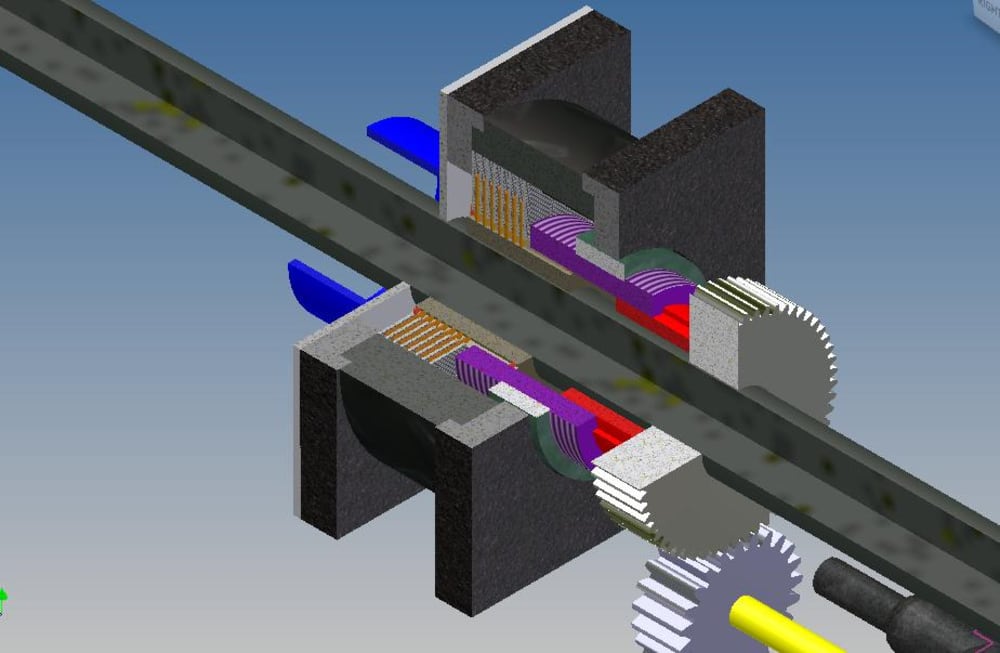
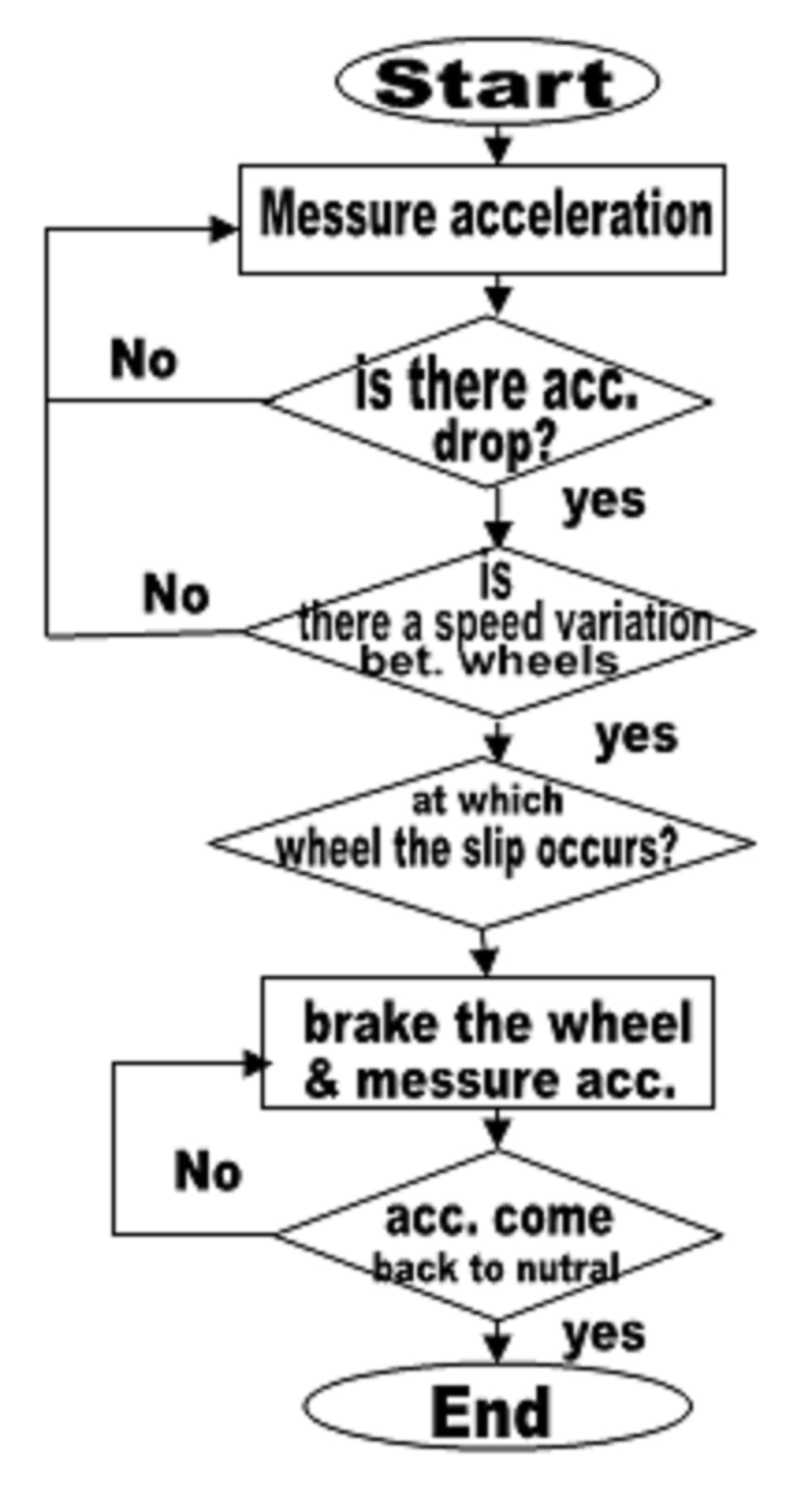
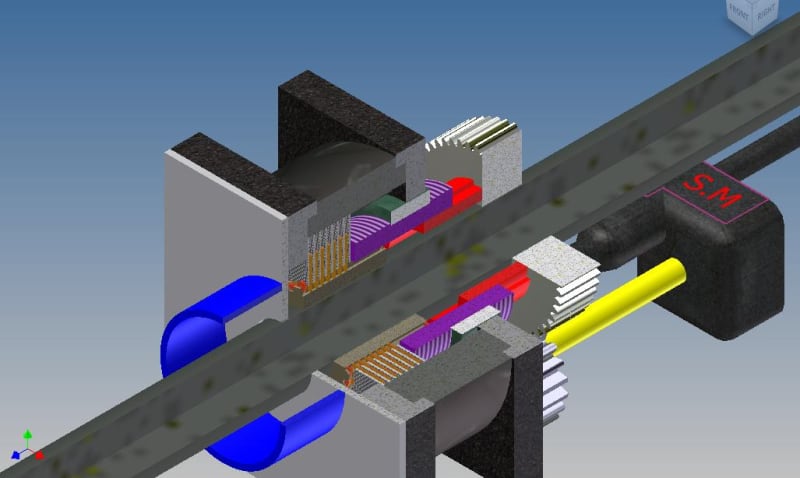
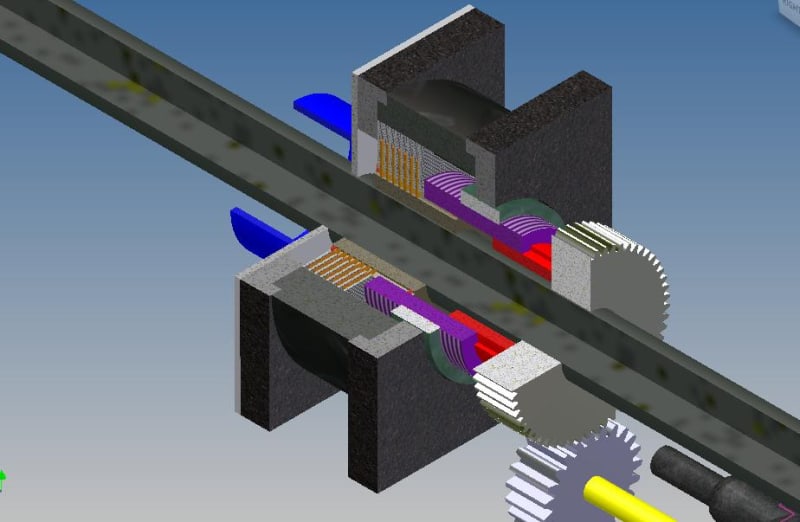
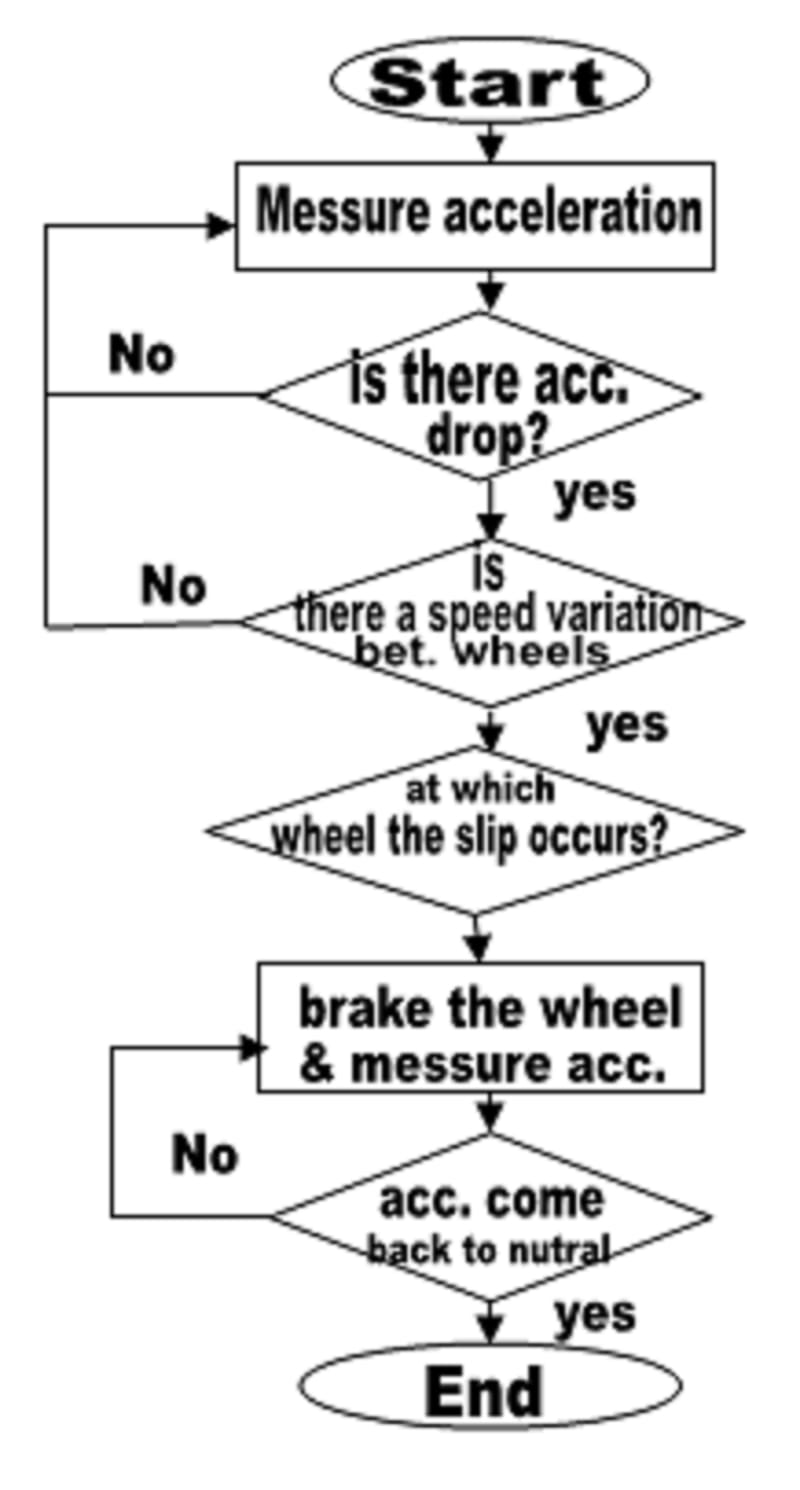
An automatic control system is introduced and integrated with a multi plate clutch system with servo control. This control technique is counted as a novel solution for the problem of an off-road vehicle traction control system. Sensors are used to check the state of systems or to measure certain quantity. Corrective action will be initiated by the system only if the difference of speed of two wheels has exceeded a particular set value. This set value is decided keeping in mind speed difference existing during normal or hard turning conditions. When slip on one tyre is more than the set value, an electrical signal is sent to the servo motor to apply brake to the appropriate side gear in the differential. The brakes are operated by using a multi plate clutch system. When the vehicle is moving straight ahead both wheels will have equal traction but when one wheel is in mud e.g. right wheel and because of differential action, the whole power from engine goes to this rotating wheel, brakes are needed to be applied to this wheel, so that power is transmitted to the other stationary wheel having traction. This way the vehicle comes out of the mud or snow.
The improved traction when pulling away any vehicle will be particularly noticeable to the driver when the road surface has various friction coefficients. This mixture of friction coefficients makes the variable distribution of the drive torque between the individual wheels more evident.
Video
Like this entry?
-
About the Entrant
- Name:Youssef Sabry
- Type of entry:individual
- Software used for this entry:Matlab, Solidworks
- Patent status:patented