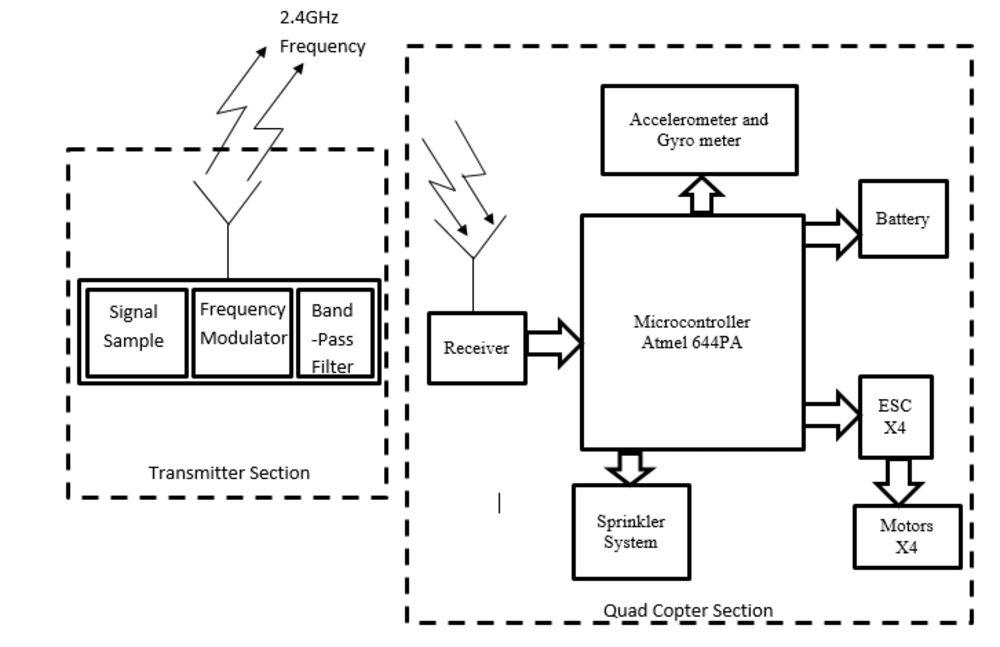





The system design is divided into two sections, Transmitter and Quad Copter Section. Figure shows different blocks in transmitter section and quad copter section and the block connections. Transmitter and Quad Copter communicate with each other using 2.4GHz bandwidth signal in free space. The range of communication is limited. It is dependent on the gain of the transmitter and sensitivity of the receiver.
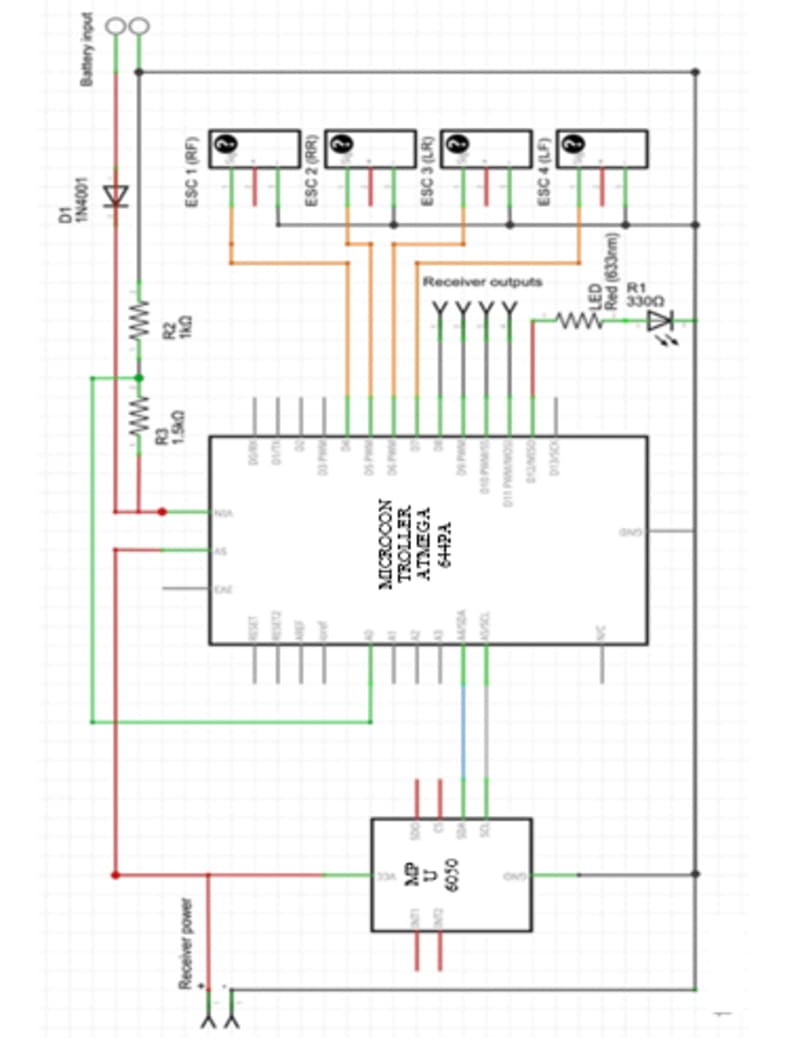
The transmitter block consists of signal sampler, frequency modulator and band pass filter. Signal sampler samples the signals at different intervals of time (multichannel operation) and frequency modulation is done and middle band frequency of 2.4GHz is selected for the band pass filter. Then the signal is transmitted in free space. The signal will be received by the Quad Copter. Frequency modulation is carried because of better reliability and performance than amplitude modulation, the frequency of the carrier is varied in accordance with the amplitude of the base band signal. In the Quad Copter section, the microcontroller, embedded with UART, ADC, PWM, BUSES constitute flight controller board. The Heart of quad copter is a microcontroller embedded with the Programs essential to control three axes moment of the quad copter i.e. Pitch, Roll and Yaw. The brushless motors are connected to the flight controller board using PWM (Pulse Width Modulated) pins, from which the speed of the motor is controlled. A UART Bridge is used to connect GPS TX, Radio TX, Video TX to the quad copter. An Analog to Digital converter is used to convert the Battery input to the board, an internal Slave Bus is used to connect Magnetometer, Gyroscope, Accelerometer. The Sprinkler System design consist of a motor with extended shaft fitted with the shower head. The motor will provide the centrifugal force required for the liquid to sprinkle in circular radius.
Inlet for Pesticide is provided in the side of Non-Rotating cover around The Shaft. Proposed Sprinkler System works on the principle of Centrifugal reaction. Rotation of motor will drive the sprinkler attached to a shaft. The area around the shaft is covered with an insulating material, with airtight suction created within the material. whenever the Sprinkler rotates, the pressure near the sprinkler increases and the pesticide flows into the provided area through the inlet. The sprinkler distributes the pesticide along the field. The area covered depends on the height of the Quad copter above the ground.
The Quad copter methodology includes balancing Quad copter along the three coordinates (roll, pitch and yaw axes) as shown in figure Movement along the Yaw axis decides the takeoff and landing of the Quad copter. Movement along the Pitch axis decides the forward, backward, right and left alignment of the Quad copter. Movement along the Roll axis decides the clockwise and anticlockwise rotation of the Quad copter. To the base of the Quad copter a motor is fixed with the help of a hinge.
Like this entry?
-
About the Entrant
- Name:Manojaya S Sarvadamana B
- Type of entry:teamTeam members:MANOJAYA S SARVADAMANA B,
SUKRUTHA S,
AMITH RAHUL PRIYANK - Patent status:none