







The objective of the project is to make an assistive limb to assist human beings in some or other activity, eliminating human errors and increasing productivity. The most common activity humans perform, be it a soldier or an industrial worker or a rural woman, is weight lifting and that is what we aim to target. The idea is to make an exoskeleton which will help human beings lift heavy weights without feeling any load/stress on the human muscle. The prototype made when worn by a human can successfully lift up to additional 40kgs with the one arm.
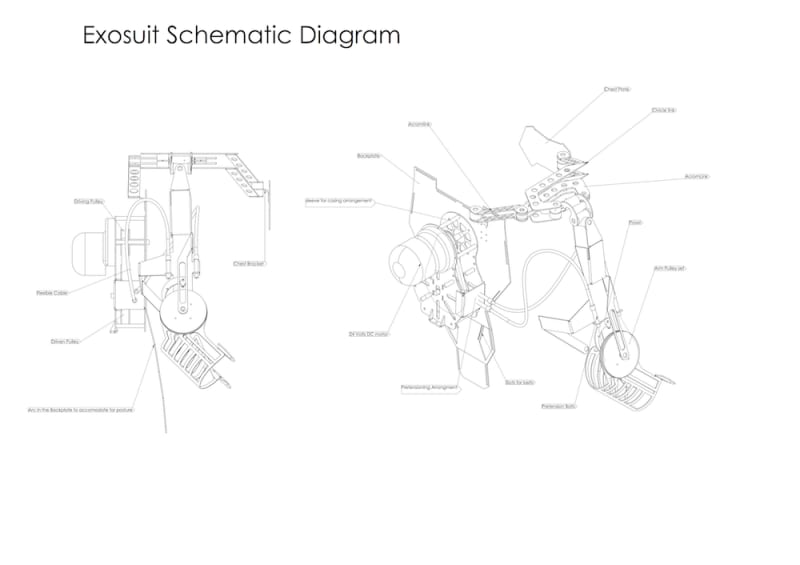
The exoskeleton is a setup consisting of mechanical linkages, motors, actuators that allow limb movement and provide higher strength and endurance. The purpose of this design is to assist human beings in lifting weight. The purpose is achieved by using battery, DC motor, 2 stage reduction mechanism, tuning pulley and cable operated pulleys, six-degree of freedom shoulder joint, forearm mechanism, ratchet mechanism, potentiometer and electromyography sensor mounted on a muscle group. All the components are mounted on an ergonomic wearable vest. The battery and the D.C motor along with the belt drive are attached on a back plate to be positioned on the person's back.
The unique two point support shoulder mechanism is attached ergonomically around the shoulder to provide six degrees of freedom permitting all movement. The elbow joint is attached to the shoulder mechanism which moves in sync with the user's elbow. Further a Forearm mechanism is designed to allow supination and pronation of the forearm and also support the wrist while pick up the load. The power from the motor is fed to the elbow joint via a two stage reduction system which in turn provides the necessary weight lifting.
An Electromyography sensor is used to obtain signal from human muscle which is then fed to motor driver and transferred to the elbow joint. The elbow joint rotates in sync with the motor and the weight to be mobilized is lifted, during the entire operation the user’s arm does not experience the force which the weight is applying on the hand and the load path is diverted to the back plate through the mechanical assembly.
The concept of exoskeleton is raw. Only the well-funded defence organisations and healthcare research institutes have successfully been able to make working models. But the cost –effectiveness, self-weight and ergonomics of designs are yet to be looked upon. The project is completely innovative and provides a much better design, driven from the above perspectives and hence has an opportunity to attract indigenous and global markets and customers. The product has wide applications in military, industrial, health-care etc.
Like this entry?
-
About the Entrant
- Name:Darshan Bamb
- Type of entry:teamTeam members:Darshan Bamb Prathamesh Sathe Anand Wadaskar
- Software used for this entry:Solidworks, ANSYS Workbench,
- Patent status:pending