
This proposal relates generally to radiolocation sphere, and particularly to monopulse direction finding systems. It can be used to increase guidance accuracy, for example, of unmanned aerial vehicles to targets such as: aerial (sea and/or ground-based) vehicles reflecting the radio signal that illuminates them; some devices radiating radio signals and jamming signals; radio beacons.
How it works.
− the reception of the signals from the target is carried out by a monopulse antenna by using sum and difference channels;
− the difference signal amplitude and the phase difference between the signals of the sum and difference channels are measured, herewith the difference signal amplitude determines a value of an angular error signal, and the phase difference between the signals of the sum and difference channels determines a sign of the angular error signal;
− the monopulse antenna is orientated in the direction of the target relying on the measured values of the amplitude and the phase difference signals corresponding to an angular error value and its sign;
− detection of polarization interference carried out by receiving signals from the target through an additional receiving channel with an additional antenna;
− the working polarization of said additional antenna is orthogonal or is close to orthogonal relative to the working polarization of said monopulse antenna;
− the amplitude values of the additional and sum signals are compared;
− when the amplitude value of the additional channel signal exceeds the amplitude value of the sum signal, the monopulse antenna is oriented relying on the angular error, the sign of which corresponds to the measured value of the phase difference between the sum and difference signals, the value is formed via the inverse transformation of the measured amplitude value of the difference signal.
* Innovation.
A method of target angle tracking is known, in which reception of signals from the target in the sum and difference channels on two orthogonal polarizations. However, the necessity of doubling in the number of monopulse reception channels (six instead of three) makes this method virtually unacceptable for usage in the air-borne equipment of aerial vehicles due to weight, and size restrictions.
The proposed solution does not have these drawbacks and is a new one. US patent.
* Manufacturability.
It will be easy to implement and it be cost-effectively manufactured.
* Marketability.
The invention can be used in homing heads of autonomous vehicles.
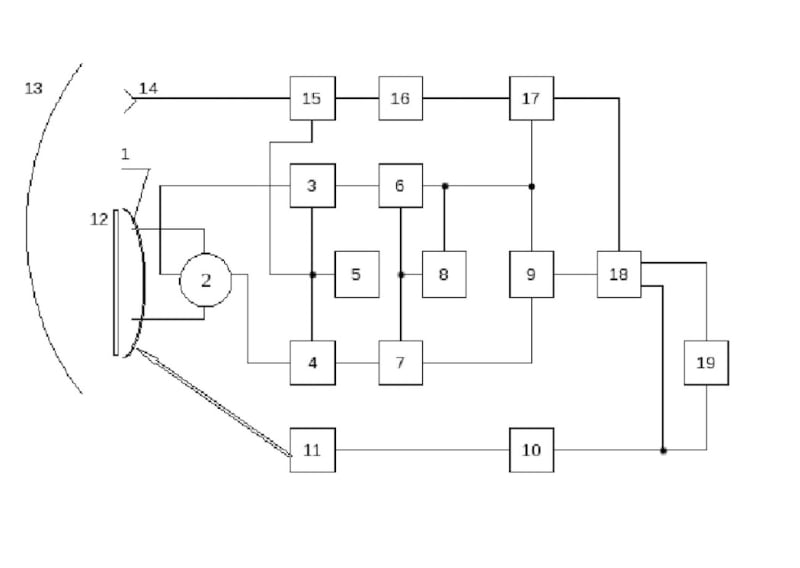
1 - Monopulse antenna,
2 - Stripline ring,
3 - Mixer of the sum channel,
4 - Mixer of the difference channel,
5 - Heterodyne,
6,7 - Intermediate-frequency amplifiers of the sum and difference channels,
8 - Automatic gain control system of the sum channel,
9 - Phase detector,
10 - Error-signal amplifier,
11 - Monopulse antenna mechanism,
12 - Polarization filter,
13 - Radome,
14 - Antenna of the additional channel,
15 - Mixer of the additional channel,
16 - Intermediate-frequency amplifier of the additional channel,
17 - Comparator,
18 - Switching device,
19 - Device for inverse convert the error signal.
Like this entry?
-
About the Entrant
- Name:Evgeny Markin
- Type of entry:individual
- Patent status:patented