

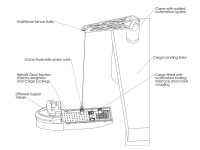

Working offshore on the back deck of supply vessels constitutes one of the highest exposure areas for vessel crew. Eliminating this exposure would improve safety and efficiency. This concept creates an equipment system that can be retrofit to existing assets to leverage the benefits associated with automation for a reasonable cost. The system consists of several components.
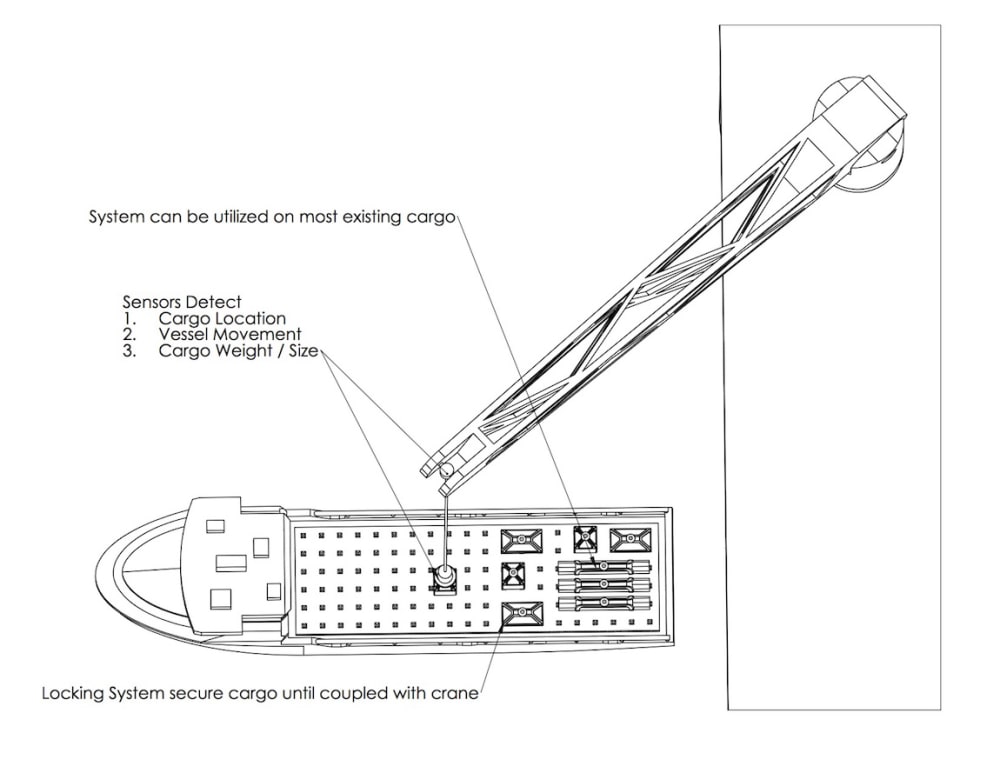
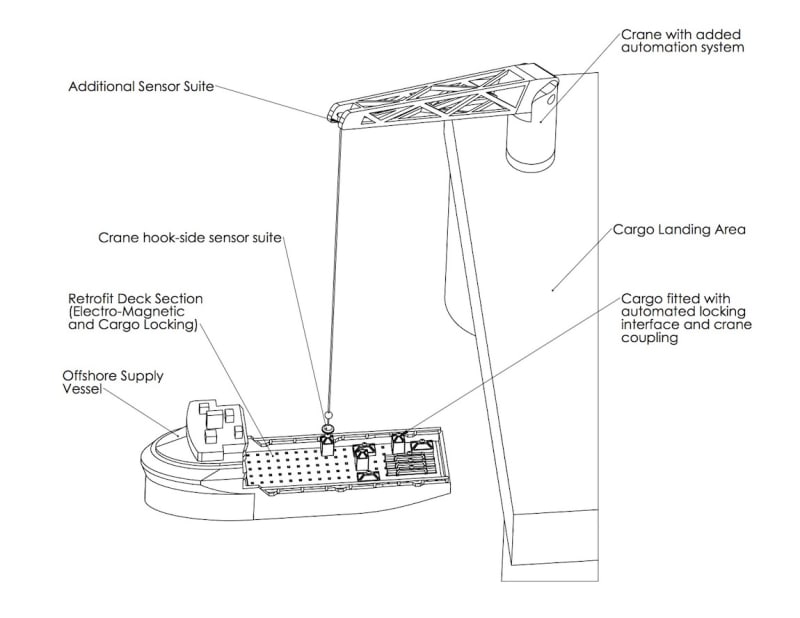
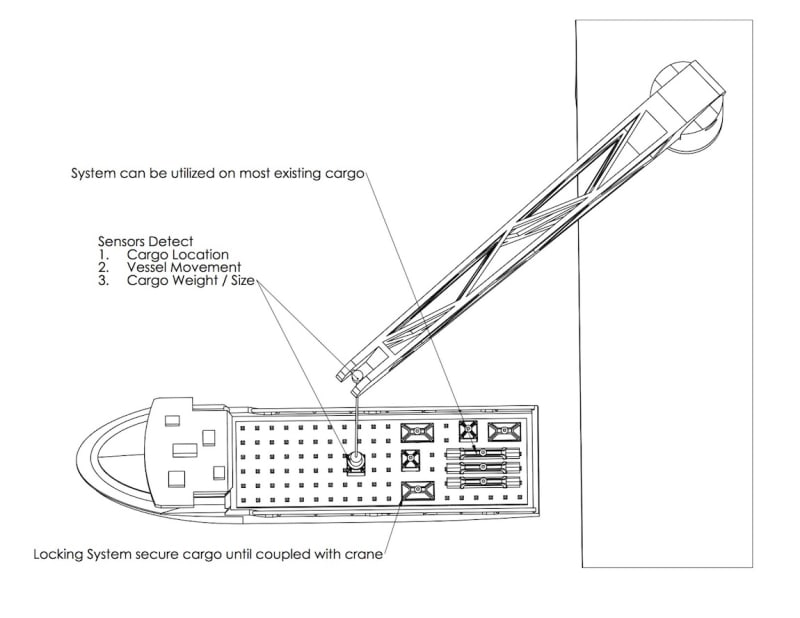
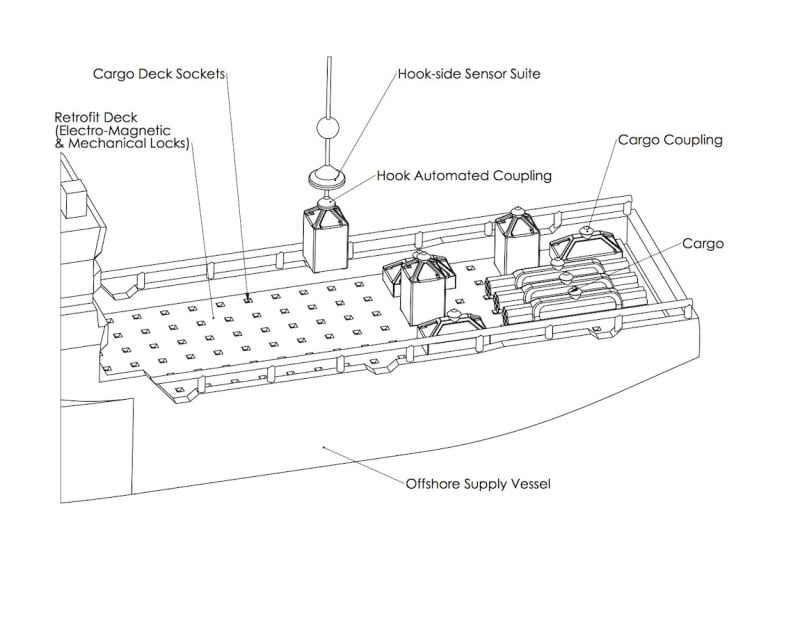
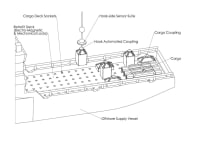
1. Deck sections that include electro-magnetic and mechanical locks to secure the cargo without human assistance. These sections are referenced to the vessel in such a way as to provide weight calculations to the vessel’s officers to aid in stability calculations.
2. Cargo retrofit bases and crane attachment sections. The bases are designed in such a way as to interface with the deck sections while maximizing deck space and automating crane / cargo connections. These attachments would work with the majority of existing deck cargo and cost little to install
3. Crane hook replacement system consisting of two parts.
a. Sensor suite – installed at a set distance above the crane hook, this sensor suite uses an array of existing sensors (Camera, Lidar, laser range finders, etc) to feed data to the automation system.
b. Conical hook mechanism with axial rotation element – allows automatic connection / disconnection to the cargo
4. Crane automation system
a. An automation system that allows the crane to pick and place cargo while sensing the relative movement of the vessel and controlling all aspects of the operation
Modern supply vessels are now using dynamic positioning systems to hold station near offshore assets. This concept is designed to automate the process of loading and discharging cargo in a challenging environment which will limit crew exposure and increase efficiency.
Example of a typical process:
1. The required loadout is planned
2. The loadout is sent to the loading onshore facility
3. The cargo is loaded onto the vessel using the automated system
4. The vessel travels to the offshore asset and establishes itself in the proper location near the asset
5. The asset will initiate the discharge plan at which point the crane will pick and place the cargo in the desired order taking into account
a. Vessel stability
b. Required sequence for cargo
c. Crane load limitations
6. The crane will begin unloading by using the sensors to scan the deck and identifying the cargo on the plan. The automation system will compensate for vessel movement in real time until the coupling meets the cargo.
7. Once the crane coupling is secure the shipboard electro-magnetic and mechanical locks will release allowing the crane to pick up the cargo and move it to the pre-planned position on the asset.
8. This process will repeat until the load plan is finished.
In addition to the implementations shown, additional features may be installed which communicate cargo data in real-time. Liquid cargo systems may also be installed which utilize automated couplings, pumping mechanisms, and auto shutdown systems.
Like this entry?
-
About the Entrant
- Name:Trent Zimmer
- Type of entry:individual
- Software used for this entry:Solidworks
- Patent status:none