




In the past few years, there have been several accidents of children falling into abandoned bore wells in India. Abandoned bore wells have turned into death pits for children. Rescue teams spend hours and sometimes days in futile attempts to save these little kids. A lot of money is also spent in these missions. In most cases they are unable to save the kids. Such events have happened numerous times in the past, and every time either the government or the bureaucracy is blamed. The rescue process to save the child from bore well is a long and complicated process. This brings out safety that how far the robot handles the child safely. The rescue operation mainly consists of three processes; Approaching the Child, Handling the body, Taking child out of the well. A regular autonomous robot could easily perform the first and third operations. These bots can make up these two steps within few minutes. But there is a great chance for injury of victim as they try hooking up body organs and cloths. Our Project deals with extreme Safe Handling of the victim. Hence our project deals with a new innovative concept of bore well rescue robot which is semi-automated such that the child fallen in the bore wells can be saved without any injury in a stipulated time.
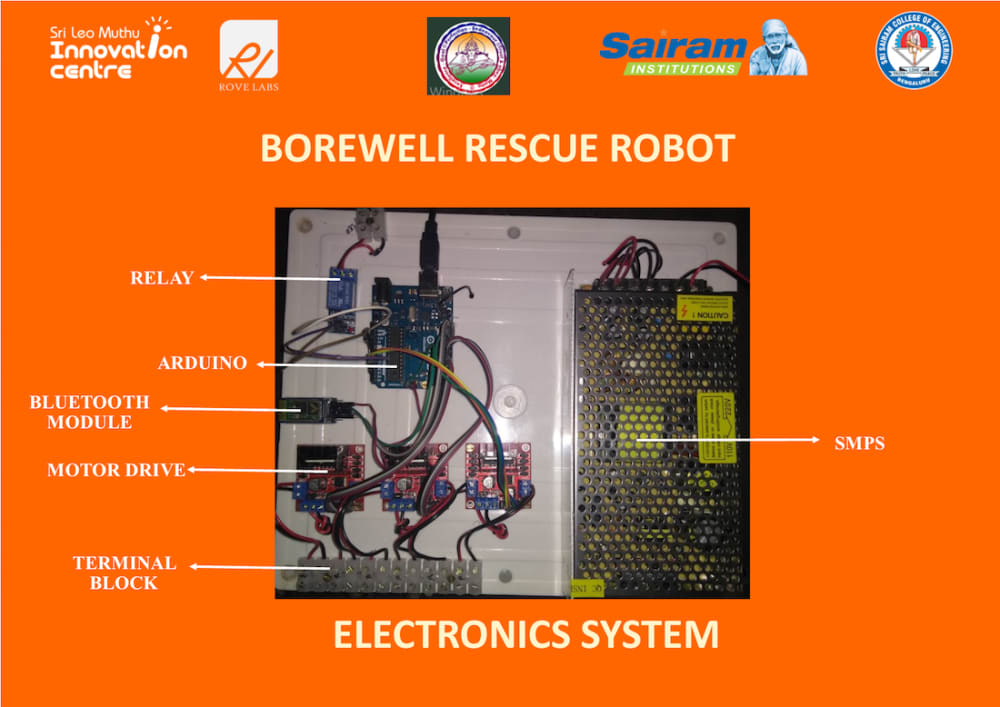
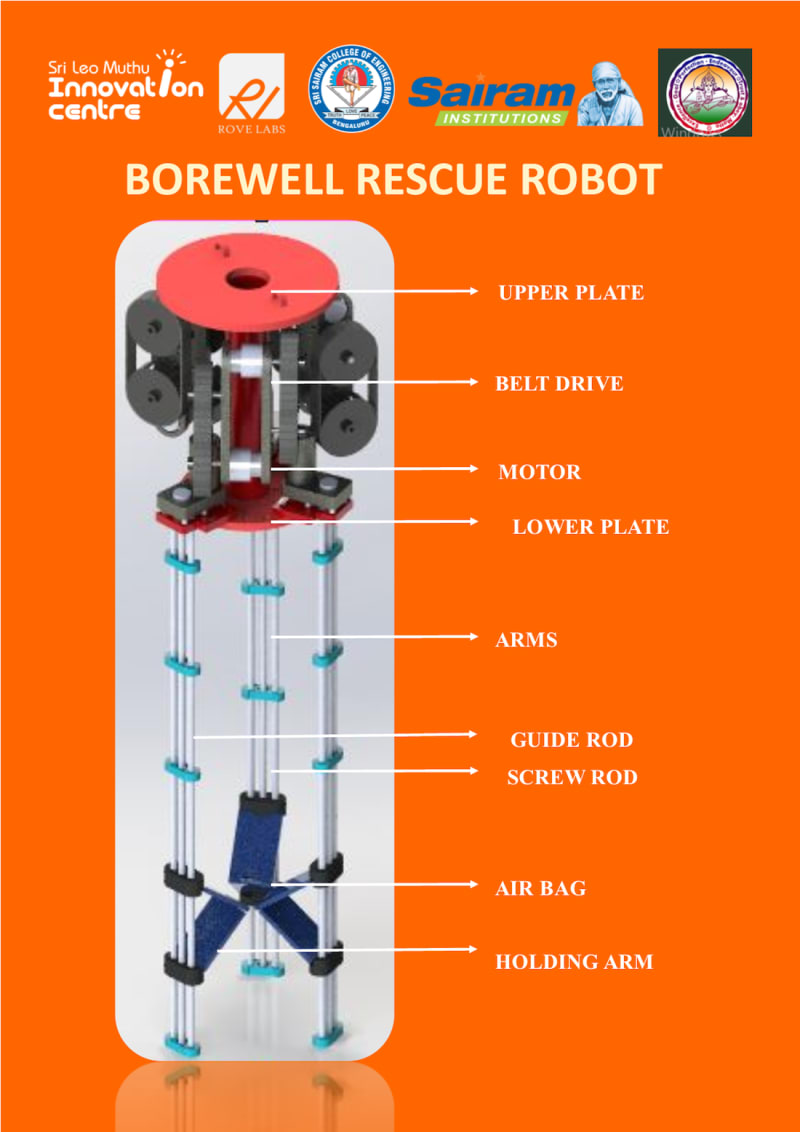
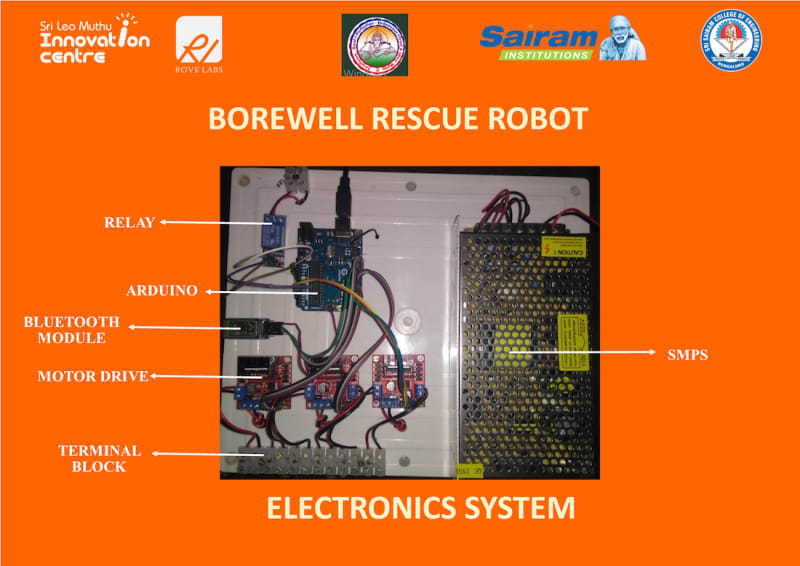
The experimental setup of our project consists of frame which in usually mounted on the ground rigidly with the help of suitable supports. At the center of the frame, it consists of a cylinder, around which the strong rope is mounted in such a way that when the cylinder is rotated, the rope gets wound over the cylinder and when it is rotated in the opposite direction, the rope is loosened and gets lowered. The cylinder rotation is provided with the help of the DC motor. At the other end of the rope, a gripper arrangement is provided which moves over a lead screw. When the lead screw is given motion, the gripper grips the victim. Also a balloon connected with hoses is mounted near the gripper which helps to supply fresh oxygen which may avoid the risk of death for a certain long time.
Hence when a victim gets caught under a bore well, this device is mounted firmly and the cylinder is actuated by activating the motor. As the cylinder rotates, the rope gets loosened and lowered and enters into the bore well along with the gripper arrangement. Once the gripper reaches near the victim, the air from a source is let in so that the victim may not lose his/her conscious. Then the motor connected with the lead screw is activated so that the gripper holds the victim and the cylinder is rotated in the opposite direction. The rope along with the victim comes up and thus the life of the victim can be easily saved with our innovative bore well rescue robot.
ADVANTAGES
• Simple in construction.
• Least time consumption.
Video
Like this entry?
-
About the Entrant
- Name:Hemanth C Reddy
- Type of entry:teamTeam members:MONISH BABU
PURANDAR RAJ
DARSHAN
MITTU KUMAR - Software used for this entry:SOLIDWORKS, MATLAB, STARCCM, ANSYS
- Patent status:none