






There are two ongoing revolutions in modern automotive industry. The first is the development of autonomous vehicles which is leading to greatly improved safety, traffic economy, environment and passenger comfort. The global autonomous vehicle market is estimated to be $54.23 billion in 2019, and is projected to achieve $556.67 billion by 2026. The second is the development of green propulsion systems, envisaging improving fuel efficiency. For example, in the US, the average on-road fuel economy of new cars and light trucks is expected to be 36-37 miles per gallon (mpg) by 2025. In comparison, the average of today’s on-road fleet is 21 mpg. The intersection of the autonomous vehicles and green propulsion systems is the future trend. However, there is a big challenge that the environment information collected by autonomous vehicles is poorly used in propulsion systems. Only few examples of using environment data to optimize energy efficiency can be found, although the potential benefits in fuel reduction and mission flexibility are great.
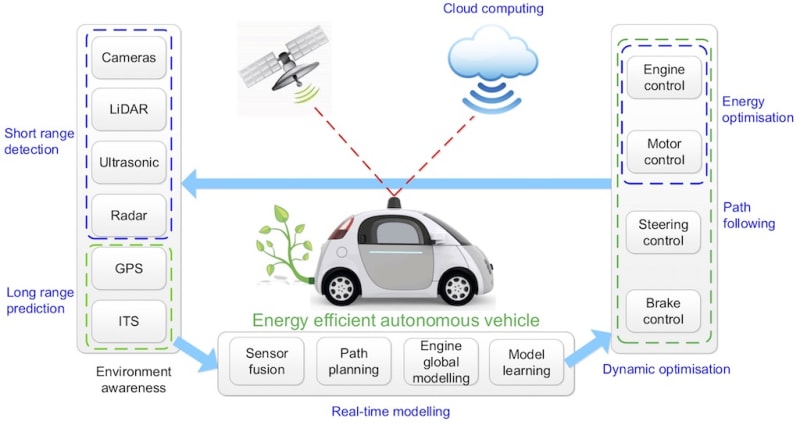
This entry aims to tackle this challenge by developing a real-time learning and optimization solution to merge the two themes as integrity. Using advanced machine learning algorithms (e.g., neuro-fuzzy network), the environment information can be used to update the propulsion system model in real time. Combining the real-time updated model with dynamic optimization methods (e.g., model predictive control), the optimal actions of the propulsion system can be obtained in a systematic way. Cloud computing will be used to assist the solving of real time learning and optimization problems. This is particularly important because today’s prototype autonomous vehicles consume 2 to 4 kW electrical power, which is equivalent to having 50 to 100 laptops continuously running in the trunk. Employing high performance computing resources on cloud, the computationally intensive modelling and optimization tasks can be cost-effectively addressed. It is estimated that Level 5 autonomous cars will send 25 gigabytes of data to the cloud every hour. Figure 1 illustrates the complete structure of the proposed solution. This methodology is capable to be applied to both ICE vehicles and hybrid electric vehicles. As an example, a preview-based real-time energy management strategy of hybrid electric vehicles is elaborated in Figure 2.
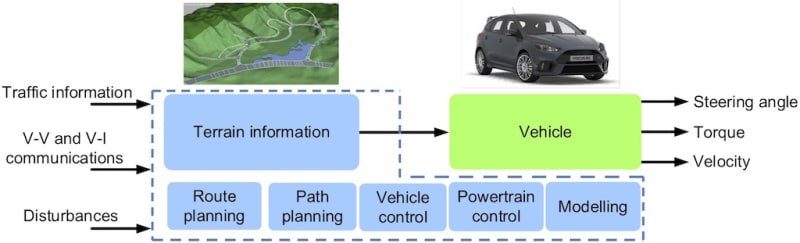
Thanks to the development of V-V and V-I communications, the energy efficiency of autonomous vehicles can be further improved based on the connectivity of vehicles. Figure 3 shows the architecture of this method. Before departure, the optimal route and speed profiles are optimized based on terrain and average traffic information. In driving, the profiles are updated according to the real-time traffic information, the sharing of neighbor vehicle positions, and the detection of disturbances using on-board sensors. This solution composes planning, control and modelling. It is applicable to vehicles with various propulsion systems including ICE vehicles, hybrid vehicles and electric vehicles. The proposed entry can save promising vehicle energy consumption, which paves a way to smarter and greener future mobility systems.
Like this entry?
-
About the Entrant
- Name:Dezong Zhao
- Type of entry:individual
- Patent status:none