





Background: According to the CDC, blindness is “a severe vision impairment, not correctable by standard glasses, contact lenses, medicine, or surgery.” 285 million people are estimated to be visually impaired worldwide: 39 million are blind and 246 have severe low vision.
About 90% of the World's visually impaired live in low‐income regions of the World. In the US, Michigan is one of the ten states with the highest rates of visual impairment.
The need: Although the white cane is somewhat useful, its limitations include the inability to detect obstacles higher than the knee and obstacles at distances of over one meter. The cane may also get caught in obstacles and cause the person to trip. The cane also keeps the user’s hands busy at all times. Furthermore, the need to constantly move the cane may cause wrist injuries. The commercial smart cane improves detection of obstacles, but it requires recharging. In places of the world, where most blind people live, electricity is either unavailable, or unreliable. Also, a commercial smart cane can cost over $1500. Smart cane also keeps the hands occupied and its method of alerting the user of an object is by vibrating the cane. This causes unnecessary stress on the wrist, especially because it is pretty heavy. The main goals of our virtual white cane project were to address these limitations of the existing solutions.
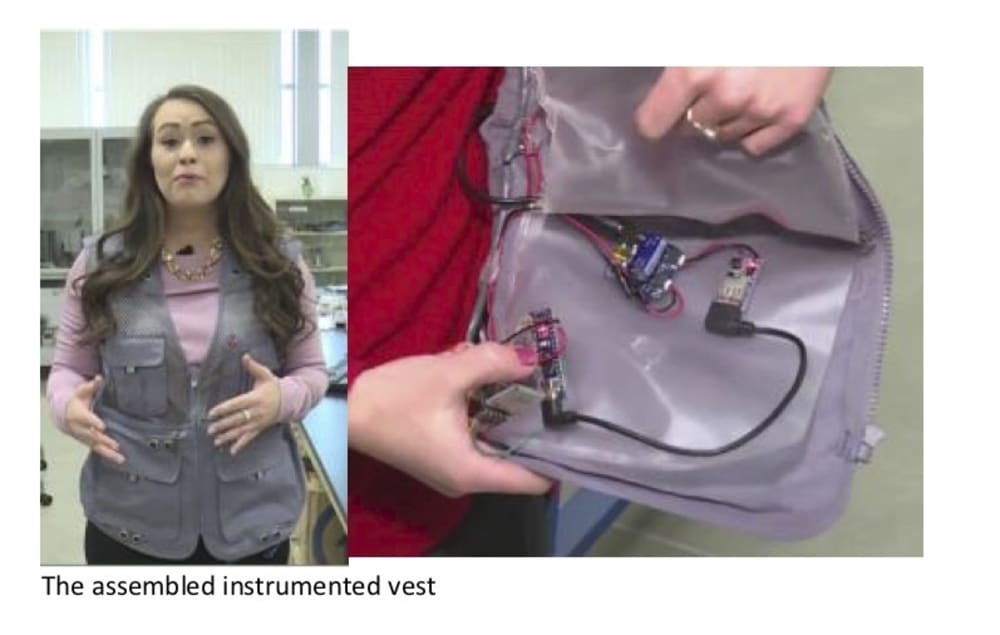
Our smarter low‐cost design we use a wearable hands‐free instrumented vest. The vest’s components include ultrasonic sensors stitched to the vest. A micro‐controller, Arduino Nano, programmed to read input from the sensors and send out a signal via Bluetooth. If an object is detected within 1 meter, the Arduino sends out a signal. The range could be increased based on need (e.g. the person’s height), but our goal is to make sure the sensors detect only real obstacles, avoiding the sensor from going off continuously indoors. It is designed for an average Indian male (height of 5.5 ft.), but can easily be adjusted to other heights.
Powering the smart cane: Energy harvesting is when energy is derived from an external source and converted into electrical energy. The energy being harvested is present anyway (such as wind or sun), it is free and nonpolluting. Several technologies were considered and solar energy was chosen due to its mature technology, compact size and low cost.
Other applications: Preventing falls in elderly people, by alerting them to obstacles.
Conclusion: Limited testing of the vest demonstrated a promising solution for obstacle detection by providing vibration and a voice alert options. This is expected to provide the end users the tools to keep them safe in most walking environments and at low cost. In addition, the energy harvesting should provide a significant boost to battery, and make it feasible for use in regions of the World, where power is unreliable. Testing in a real world environment has not yet been completed and could discover unexpected obstacles. These will be addressed under further development of the smart white cane.
-
Awards
-
 2020 Consumer Products Honorable Mention
2020 Consumer Products Honorable Mention -
 2020 Top 100 Entries
2020 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Pnina Arigur
- Type of entry:teamTeam members:Pnina Ari-Gur, Professor, Western Michigan University
Justin Rittenhouse, Graduate Student, Western Michigan University
Julia Strauss, Student (HS) Kalamazoo Area Mathematics & Science Center
Anna Puca, Student (HS) Kalamazoo Area Mathematics & Science Center - Software used for this entry:Arduino Programming Language
- Patent status:none