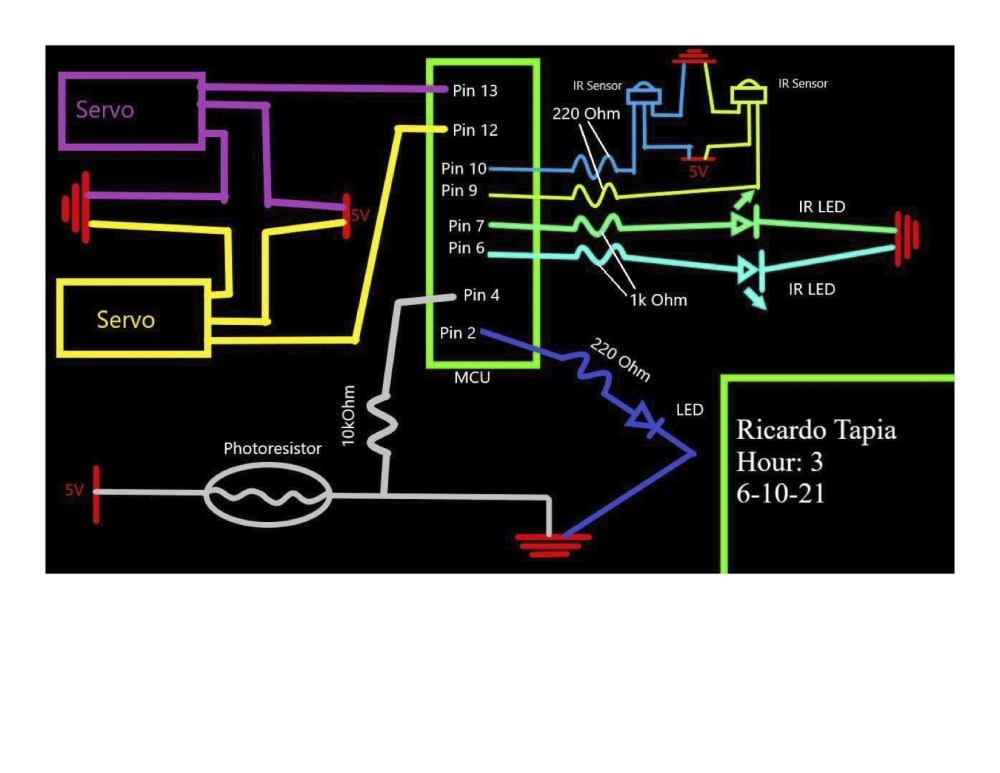
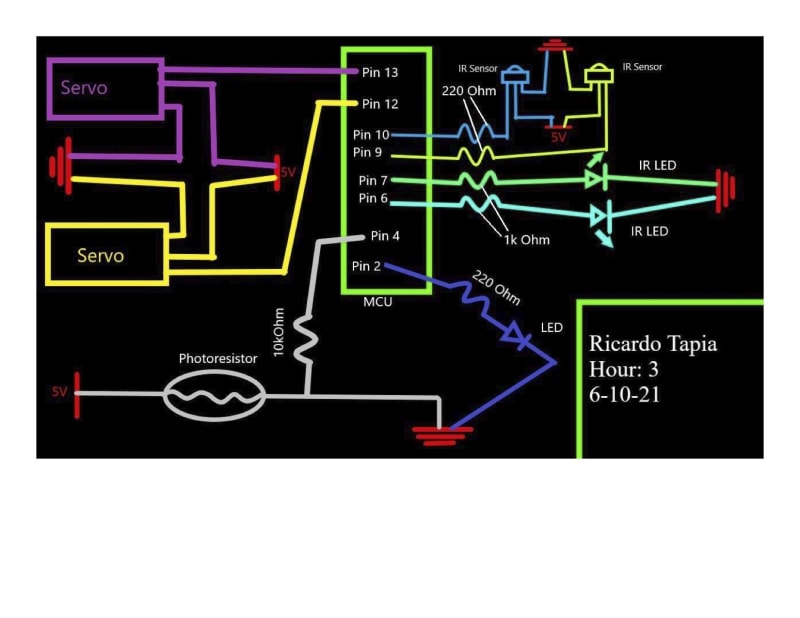
I designed a circuit, built, wired, and programmed an Autonomous Car, so it would drive autonomously by avoiding obstacles. If there is an obstacles in front, or on the right or on the left side of the car, the car would reverse and turn left or right.
I added two the IR sensors, two IR LEDs, a Photoresistor, and an LED to my autonomous car. The IR Sensor and the IR LED use infrared light. This form of light is not visible to us. The IR LED sends a signal and the IR Sensor receives that signal. If there is an object in front of the car, the IR Sensor will receive the signal from the IR LED and the signal time will determine how far the object is. Then, the car will back up accordingly. The Photoresistor and the LED work like the headlights on a car. If there is no light, the LED would be on, and if there is a light, the LED would be off.
Like this entry?
-
About the Entrant
- Name:Nahed Bizzari
- Type of entry:individual
- Software used for this entry:SolidWorks
- Patent status:none