



A single Pivoting Axle mounted at each fore-and-aft end of an EV platform and controlled by a simple CPU enables it to accelerate, decelerate, steer, dampen and theoretically brake without resorting to any additional hardware components. It’s all controlled by software codes!
No other autonomous platform technology can be made simpler and cheaper while offering an abondance of dynamic control capabilities without the need to employ any actuators. We can now constantly redistribute the limited onboard energy to each wheel without needing additional battery capacity for feeding unnecessary actuators.
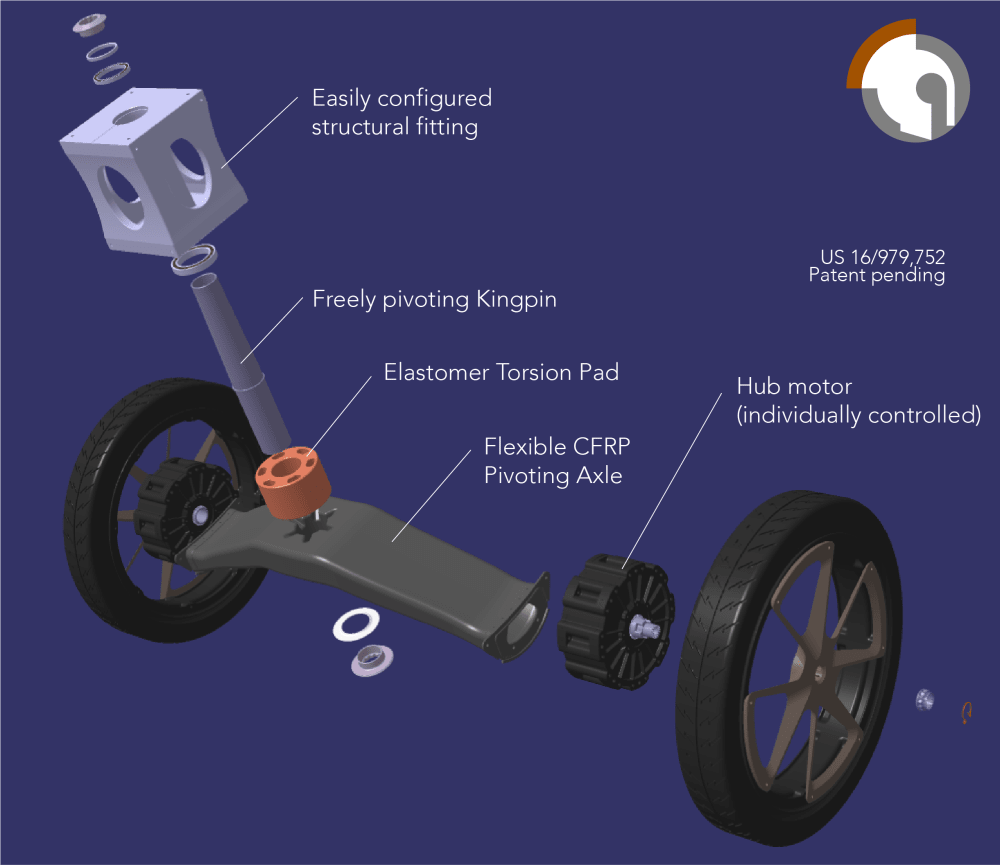
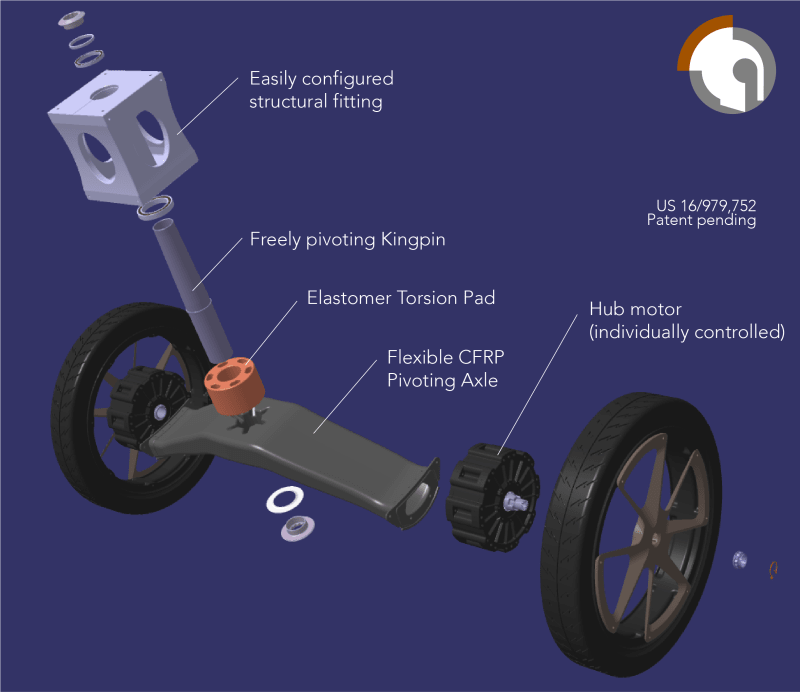
What the Pivoting Axle technology brings is a shift from traditional hardware complexity to an almost complete software operation where all the vehicle’s dynamic behaviour is simply controlled by individually modulating the torque and speed of the 2 electric motors mounted at each end of a single freely pivoting and flexible composite transverse axle member. A central processing unit in addition is all that is needed in comparison with scores of expensive mechanical components or electrically actuated ones.
We thus eliminate from the traditional chassis all transmissions, differentials, the entire steering system and its associated linkages, the conventional strut suspensions and the friction brakes.
There is not much left!
The Pivoting Axle architecture is a complete departure from the traditional automobile undercarriage layout. Instead of being attached to the four corners of the sprung mass, each axle is constrained to pivot inside a central hub held firmly at each end of the sprung mass. By giving slight angles to each of those pivot axes, their loci will meet some distance underneath the vehicle. This simple planar geometry unleashes the full dynamic potential of the concept by interlocking the pivoting motion of both axles with the rolling behaviour of the sprung mass, whether a side force is generated or not. This mechanism is nothing new – its inspiration is taken straight from the common skateboard.
While turning, the roll angle will bring the sprung mass CoG closer to the inner tires and will therefore exert a counter-moment to the normal weight transfer direction. The greater the pivot axis angle we design in, the more the sprung mass will roll and the more important this counter-moment will become. All this is done without imparting large torsional loads to the platform.
A Pivoting Axle requires much narrower tires than for a conventional vehicle drivetrain because lateral load transfer during a turn is substantially reduced thus limiting the total drivetrain’s lateral tire slip by up to 20%. Narrower tires bring reduction in friction, in unsprung mass, in wheel/motor assembly inertia and ultimately in motor sizing.
The Pivoting Axle architecture can be utilized on all categories of land vehicles, from three wheels micro-mobility cycles to four wheels automobiles and light trucks to multiple axles heavy rigs. On this last configuration, for autonomous operation, the Pivoting Axle technology opens up the possibility to remove the tractor altogether since all the trailer’s axles are now self propelled and self steered.
Like this entry?
-
About the Entrant
- Name:Eric Deschamps
- Type of entry:individual
- Software used for this entry:Maplesim, Catia V5, MSc APEX
- Patent status:pending