Our everyday lives rely significantly on visual input, which pose multiple challenges for the visually impaired. Technology and ingenuity have provided tools to manage some of these challenges, but close-range object detection still has not been effectively addressed. Situations such as going to a restaurant and locating utensils, glasses and plates on the table or visiting family and locating the faucet handles or soap in the bathroom are still problematic.
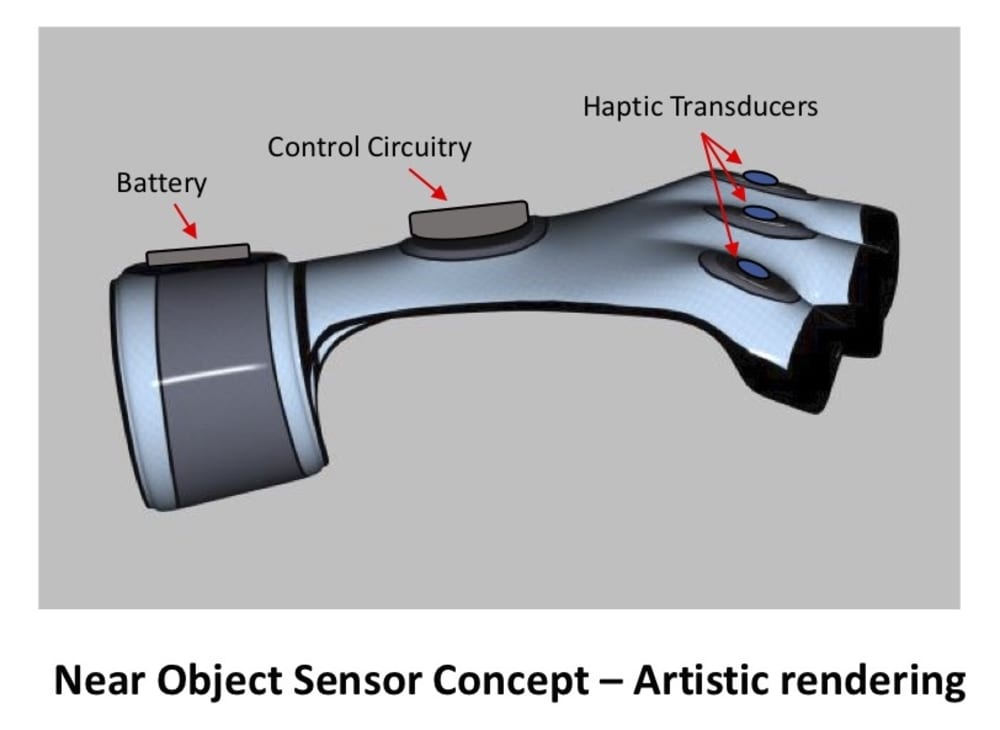
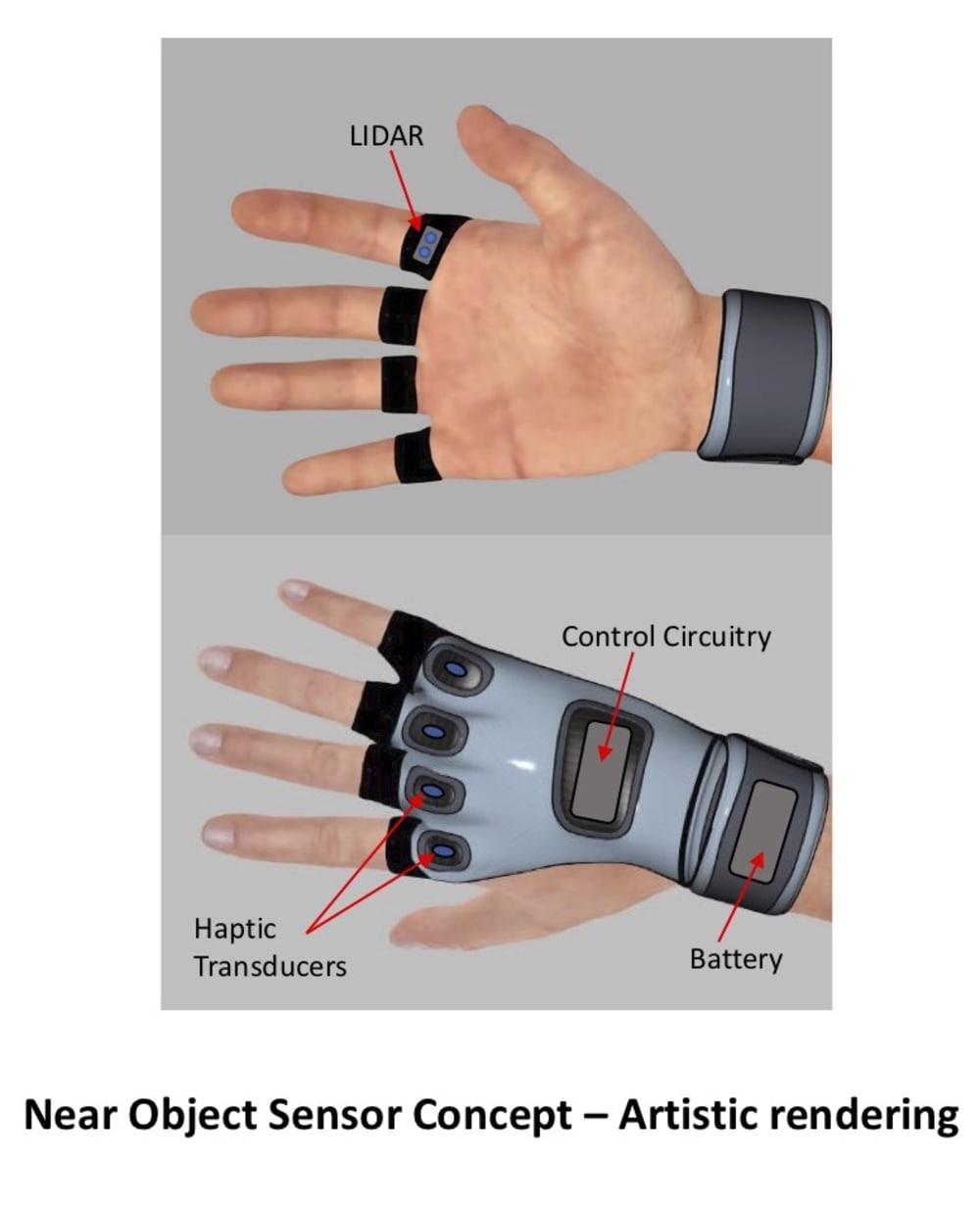
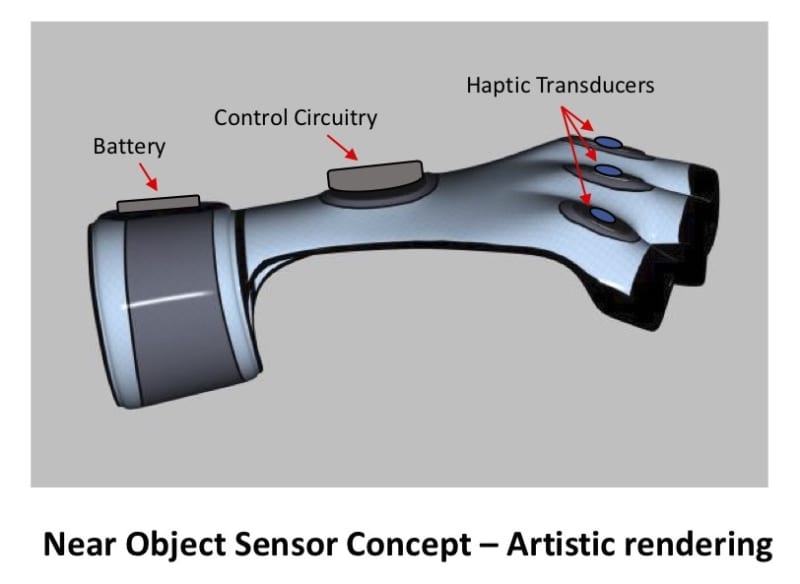
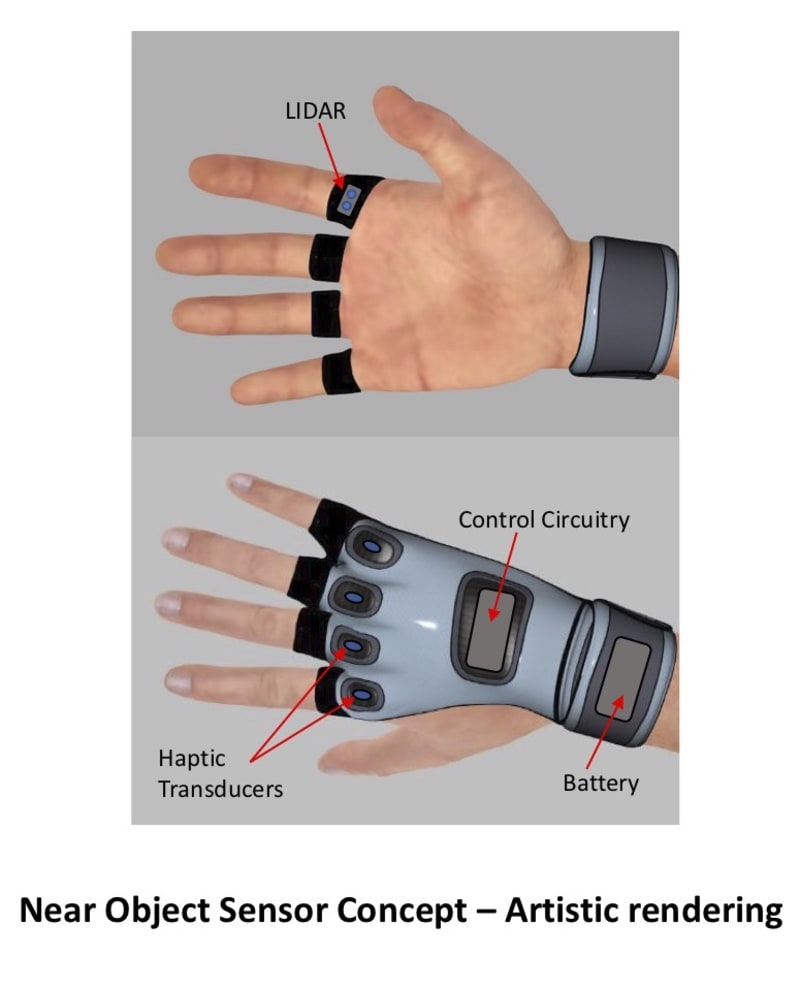
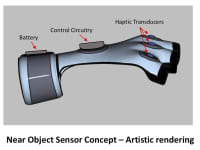
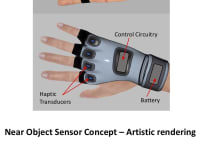
Our product proposal, the Near Object Sensor (NOS-1), is a smart wearable object detector for the visually impaired. We imagine its implementation as a fingerless and palmless globe as shown in the submission pictures. Moving the user’s hand over an area allows for the mapping of nearby objects.
NOS-1 consists of a proximity detector, a microcontroller, custom software and an input/output interface to provide feedback to the user. The system is to be powered by a rechargeable battery. The software provides feedback not only on the objects’ distance but also on the objects’ edges. The feedback could be provided by sound with a tone associated with distance or with a haptic interface with tactile pulse frequency associated with distance. At this time, we believe that haptic feedback will be preferred versus the audible one, so the proposed feedback implementation is through four magnetic or piezoelectric haptic transducers. Three of the transducers will provide feedback on the distance by modulating their touch frequency. The fourth transducer will provide feedback on sharp distance transitions. The proximity sensor is to be placed in one of the finger wraps, on the palm side.
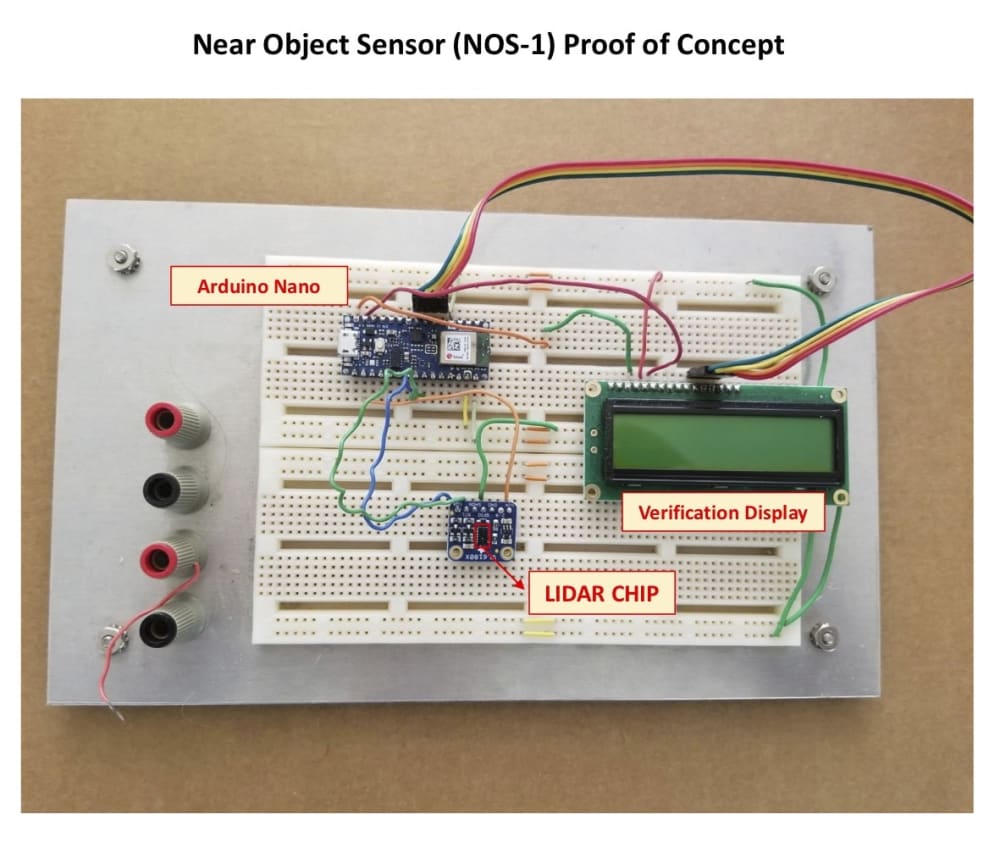
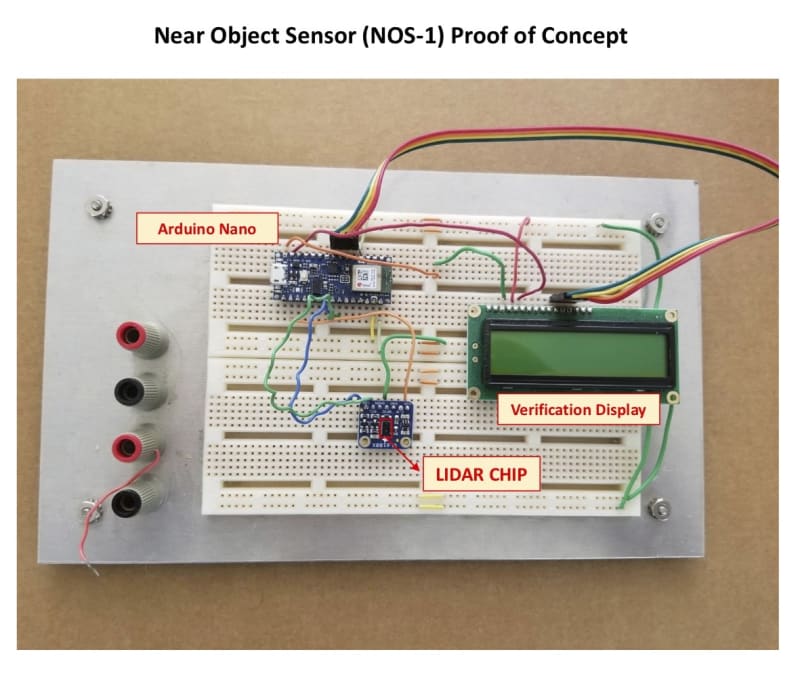
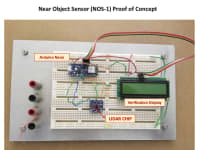
In our proof of concept, we used a chip-level lidar as a detector and an Arduino to complete the hardware. The lidar provides a narrow operational angle, which allows for a good spatial scanning resolution. In this proof of concept, we are validating distance with a display, but the display will be replaced by the adequate non-visual feedback in the next prototype.
To our knowledge, there is no similar product on the market for the visually impaired. Object detection solutions are focused on object avoidance and navigation while the user is walking. These products are usually implemented as smart canes. We believe that the innovation of our product rests in the novel wearable design and the unique combination of available technology and custom software to solve a very specific problem. Manufacturability should not be an issue as we can leverage processes from other wearables with similar technical footprint.
Like this entry?
-
About the Entrant
- Name:Osvaldo Buccafusca
- Type of entry:teamTeam members:Osvaldo Buccafusca
Lucas Buccafusca - Software used for this entry:MATLAB and Arduino IDE 1.8.15 software
- Patent status:none